 osrf-migration
commented
10 years ago
osrf-migration
commented
10 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
Does the model have multiple links? I'm asking because I see different Entity::SetWorldPose* functions used for models, canonical links, and everything else
(see end of Entity::Load).
So I'm wondering if SetWorldPoseDefault is broken, in which case non-canonical links should have a static world pose as well.
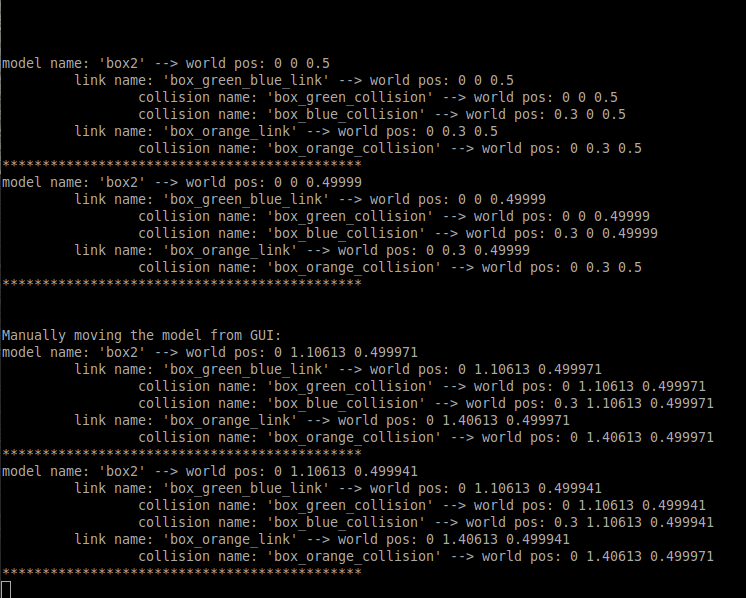
Original report (archived issue) by Andrei Haidu (Bitbucket: ahaidu).
During simulation Collision::GetWolrdPose does not get updated.
Here is a testing piece of code:
During the simulation while the object is moving the link poses change, and the collisions maintain their original position.
Testing works with a simple box model.