 osrf-migration
commented
7 years ago
osrf-migration
commented
7 years ago Open osrf-migration opened 7 years ago
osrf-migration
commented
7 years ago osrf-migration
commented
7 years ago osrf-migration
commented
6 years ago Original comment by Shane Loretz (Bitbucket: Shane Loretz, GitHub: sloretz).
Seems likely that this either a rendering or GUI issue. The pose of a model seen by a logical camera seems is unaffected.
I tried a world with a logical camera and a box with 3 cases:
<sensor><model> that has the <sensor>In each I clicked the button for orthographic perspective then top down perspective.
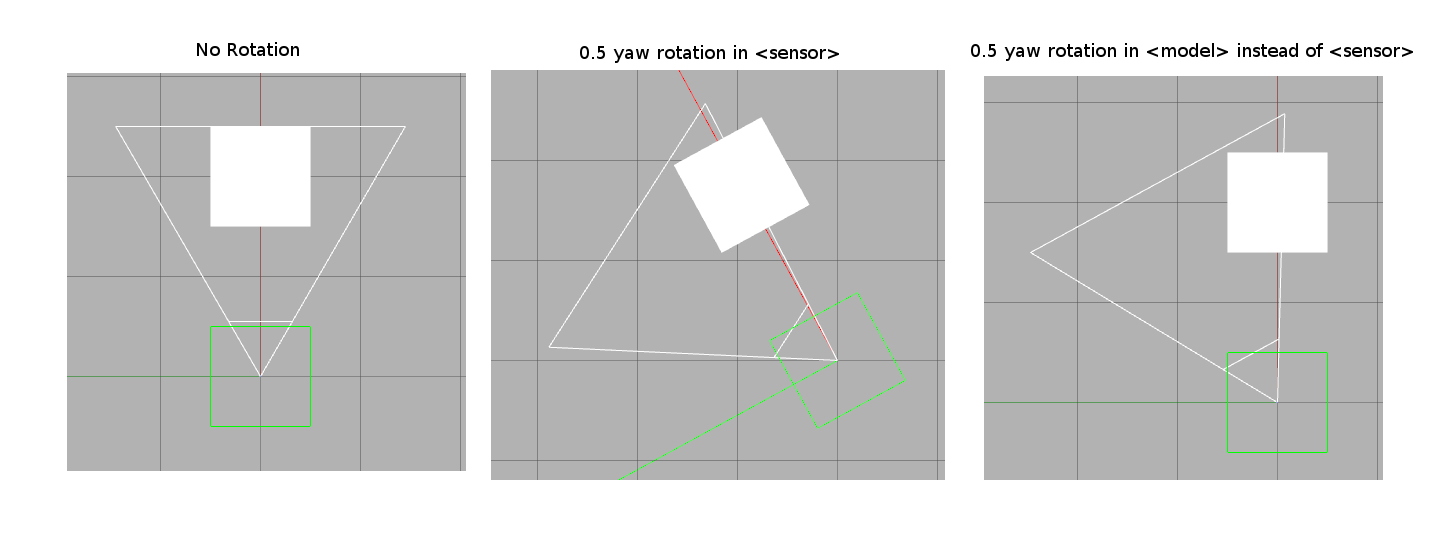
The client window always aligned with the grid. When the rotation was in the <sensor> element everything appears to have been rotated in the client. However, the world pose of the box is identical in cases 1, 2, and 3. The logical camera pose is identical in case 2 and 3. It seems like physics is working with the right poses. The worlds appear identical in ode and bullet.
osrf-migration
commented
6 years ago
Original report (archived issue) by Louise Poubel (Bitbucket: chapulina, GitHub: chapulina).
Try this minimal example world:
Without the sensor pose element, the world looks like this:
With the sensor pose element (just adding that, the rest of the world is all the same!), it looks like this: