osrf-migration
commented
7 years ago
osrf-migration
commented
7 years ago Open osrf-migration opened 7 years ago
osrf-migration
commented
7 years ago osrf-migration
commented
7 years ago Original comment by narwel_evanli (Bitbucket: narwel_evanli).
osrf-migration
commented
7 years ago osrf-migration
commented
7 years ago osrf-migration
commented
7 years ago Original comment by narwel_evanli (Bitbucket: narwel_evanli).
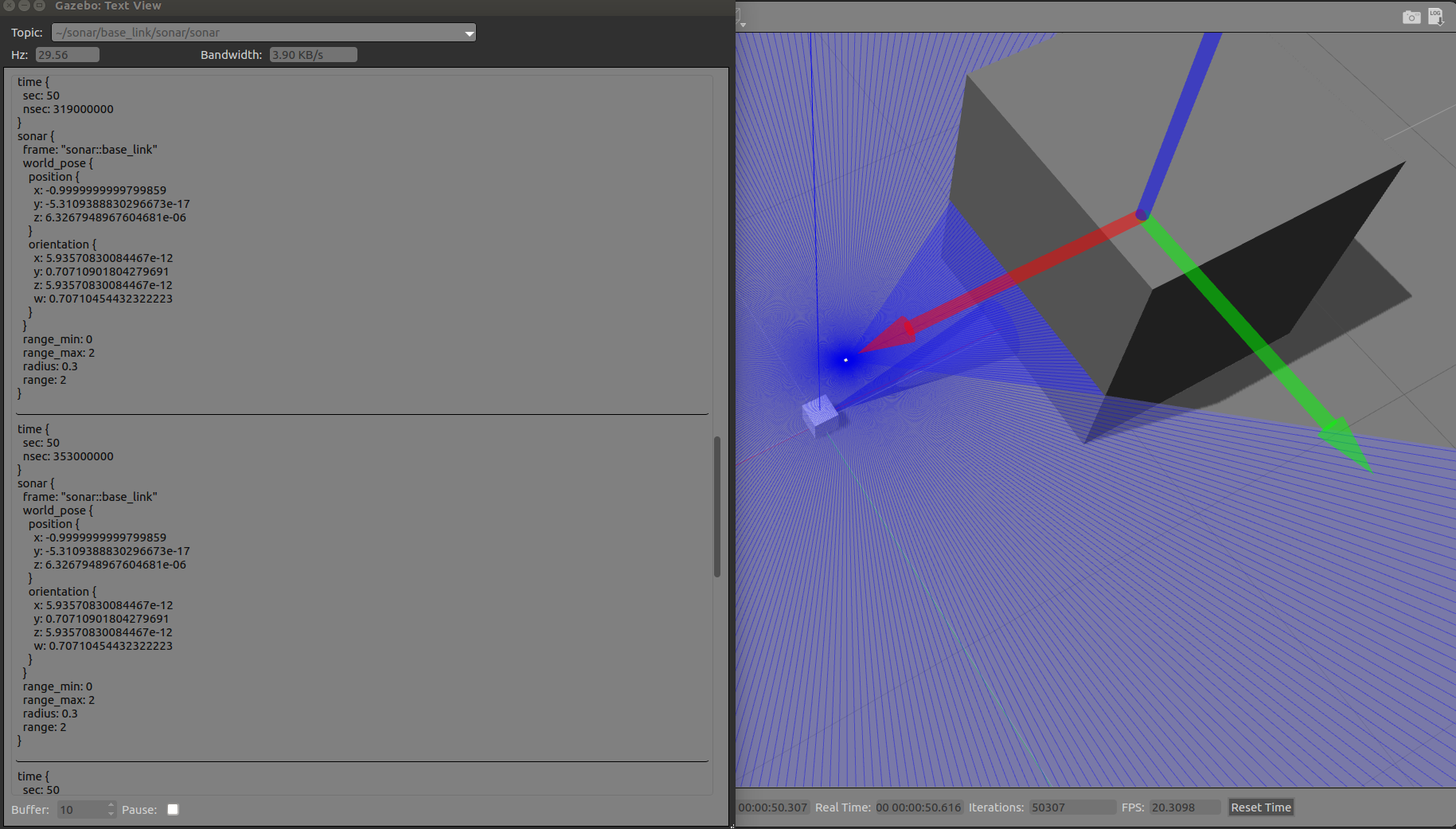
Yes, the sonar will only has static output at the max range but cannot detect any object.
Original report (archived issue) by narwel_evanli (Bitbucket: narwel_evanli).
The original report had attachments: sonar_test.tar.gz
Sonar is not compatible with ray sensor , attachment is example you can run with
add some obstacle to the world , you will see the result as below: