 osrf-migration
commented
5 years ago
osrf-migration
commented
5 years ago Original comment by Christian Rauch (Bitbucket: christian-rauch).
The order in which both cameras are added seems to matter. If you load a scene without cameras and add the cameras manually via Gazebo's GUI, you get different results depending on the order:
-
If Depth Camera gets added fist and Camera second, you get wrongly illuminated colour images.
-
If Camera gets added fist and Depth Camera second, the correct illuminated colour images are shown.
Original report (archived issue) by Christian Rauch (Bitbucket: christian-rauch).
The original report had attachments: camera_lighting_problem.world
In a minimal example world with a camera and a depth sensor (see attached world file), the colour images have wrong illumination: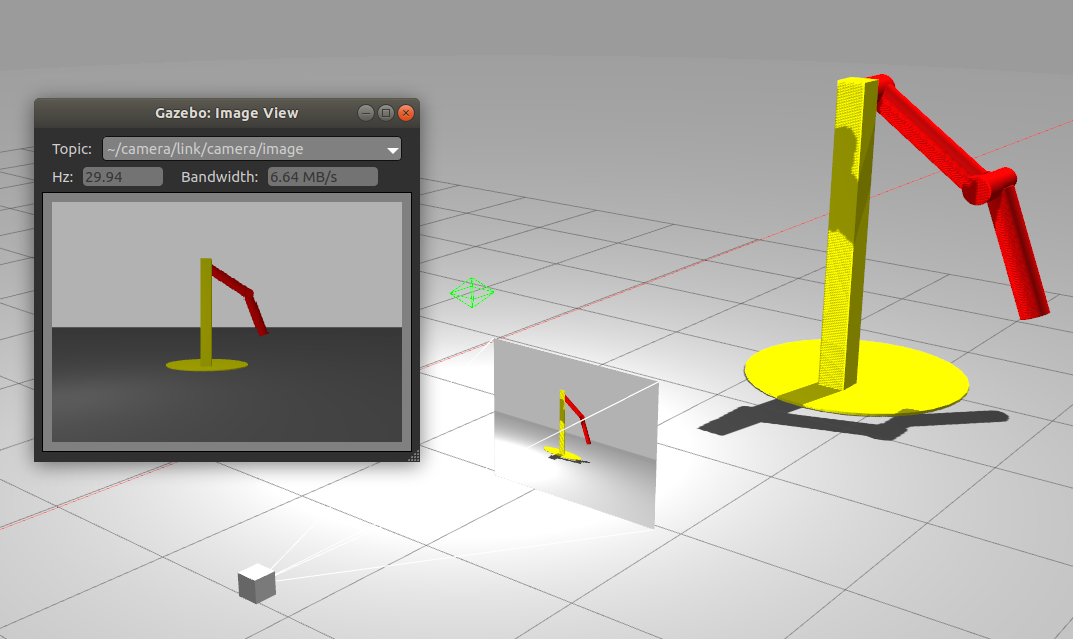
While the visualised image (the one in the camera frustum) has the correct colours, the published images are missing the correct illumination. E.g. they are missing shadows and the colours are less vivid.
If always_on is disabled for the depth sensor, it sometimes seem to work.