 osrf-migration
commented
11 years ago
osrf-migration
commented
11 years ago Original comment by Brian Axelrod (Bitbucket: brianaxelrod).
I agree, that this would be very useful. I've had to write gazebo plugins to do exactly this in the past.
@hsu I haven't spent too much time looking at the gazebo source, what would be involved in implementing this properly in gazebo itself?
Original report (archived issue) by Jesper Smith (Bitbucket: jespersmith).
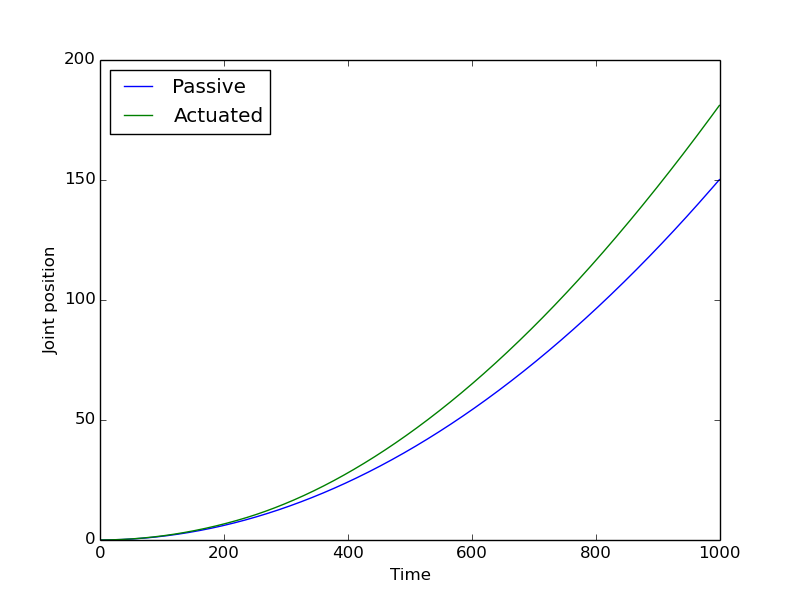
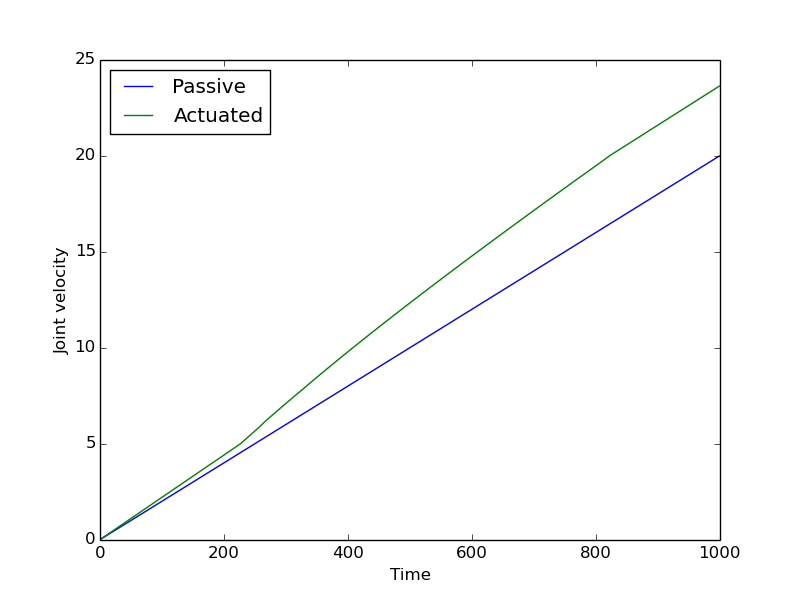
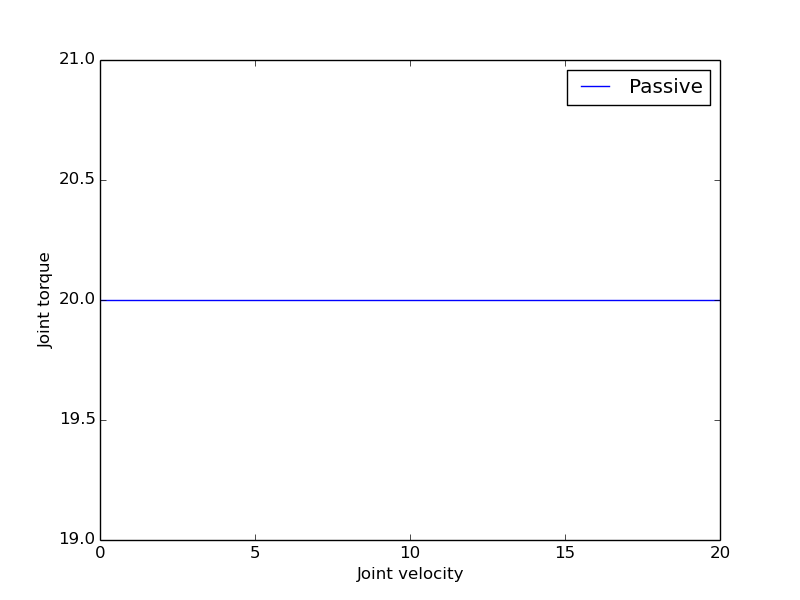
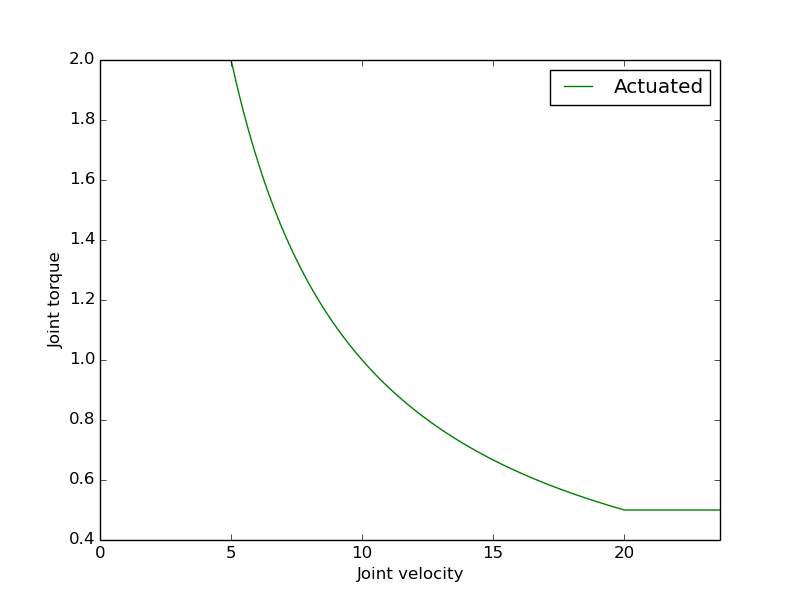
Real actuators have maximum torque and speed values that are independent(for example, electric motors have a linear relation)
It would be nice if a simple torque-speed curve can be given as an actuator limit instead of a maximum force and maximum velocity.