 X3msnake
commented
7 years ago
X3msnake
commented
7 years ago mechanical backlash?
2017-10-17 2:30 GMT+01:00 Mr. Baltazar notifications@github.com:
[image: 22563535_10155507327681357_993175263_o] https://user-images.githubusercontent.com/16564592/31642102-043e11b8-b29e-11e7-9242-c25b4f5fff5f.jpg
So,, I built a 50 watt CNC CO2 laser and it started doing this a few months ago. I can't figure out why. I tell it to do 3 passes and the lines slowly get off in both the X and Y. Does anyone know why this would suddenly happen??
It will wander in both positive and negative. It Does this on any Gcode I use.
Arduino UNO with a screw terminal shield. 3 TB6600 stepper drivers driving 84 ounce/inch nema17s at 1.8 amps. 2 steppers running Y,, 1 stepper running X. 20 tooth gT2 on a belt drive 80 steps/mm does this at every speed. It worked fine before at 15,000 mm/minute (Y at 10,000) does this at every acceleration. Worked fine at 1200 mm/s/s (Y t 800)
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub https://github.com/gnea/grbl/issues/292, or mute the thread https://github.com/notifications/unsubscribe-auth/AKke-sv29gEZnjcnujN8hDQDtWEupBf8ks5stAMrgaJpZM4P7dLP .
-- Com os melhores cumprimentos, Vinicius Silva
 brakthehun
brakthehun chamnit
chamnit
 indyucoder
indyucoder vMeph
vMeph

 swarfer
swarfer biasedlogic
biasedlogic jahnj0584
jahnj0584 JBSchueler
JBSchueler dip 4-5-6 should be ON-OFF-ON (1.5A)
dip 4-5-6 should be ON-OFF-ON (1.5A) langwadt
langwadt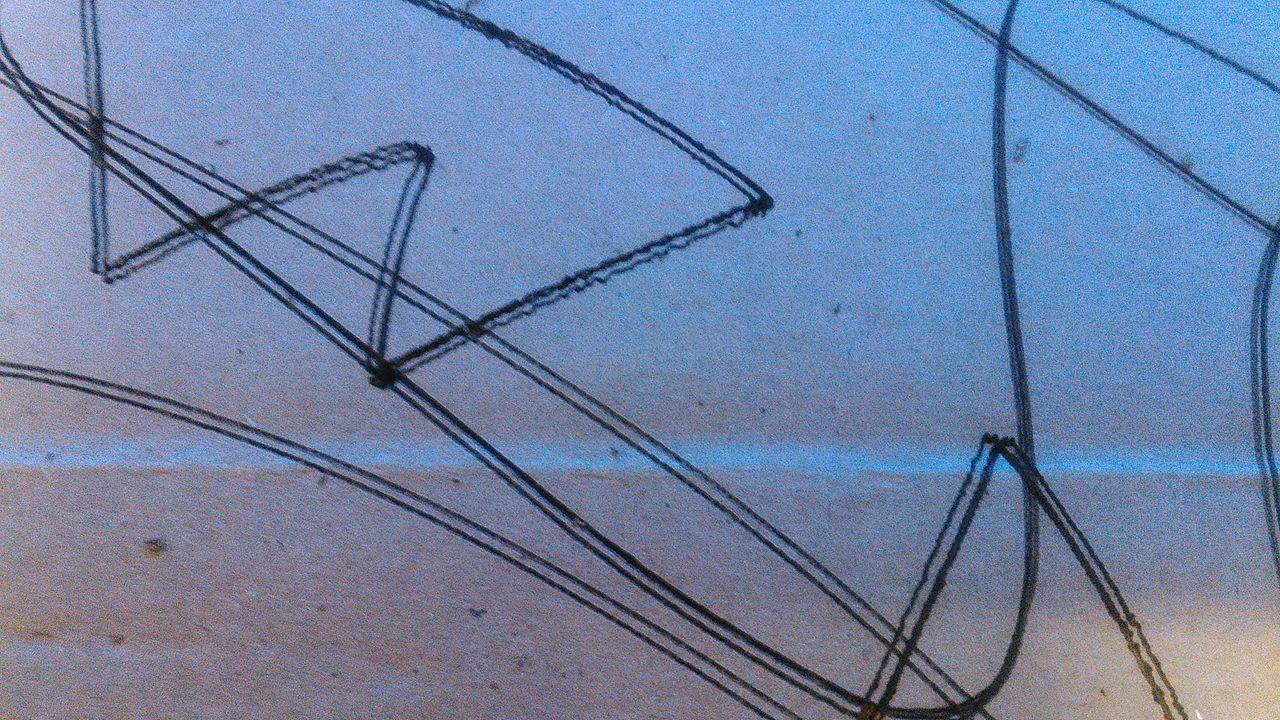{kind=link}
{kind=link}
So,, I built a 50 watt CNC CO2 laser and it started doing this a few months ago. I can't figure out why. I tell it to do 3 passes and the lines slowly get off in both the X and Y. Does anyone know why this would suddenly happen??
It will wander in both positive and negative. It Does this on any Gcode I use.
Arduino UNO with a screw terminal shield. 3 TB6600 stepper drivers driving 84 ounce/inch nema17s at 1.8 amps. 2 steppers running Y,, 1 stepper running X. 20 tooth gT2 on a belt drive 80 steps/mm does this at every speed. It worked fine before at 15,000 mm/minute (Y at 10,000) does this at every acceleration. Worked fine at 1200 mm/s/s (Y t 800)