 barbeau
commented
6 years ago
barbeau
commented
6 years ago One item that should be addressed is how propagation behaves across trips in the same block. To my knowledge the spec is currently silent on this issue in general (see https://github.com/CUTR-at-USF/gtfs-realtime-validator/issues/90), so a more general proposal could be created to address this question for FULL_DATASET feeds too.
 TeXitoi
TeXitoi abyrd
abyrd derhuerst
derhuerst skinkie
skinkie github-actions[bot]
github-actions[bot] bdferris-v2
bdferris-v2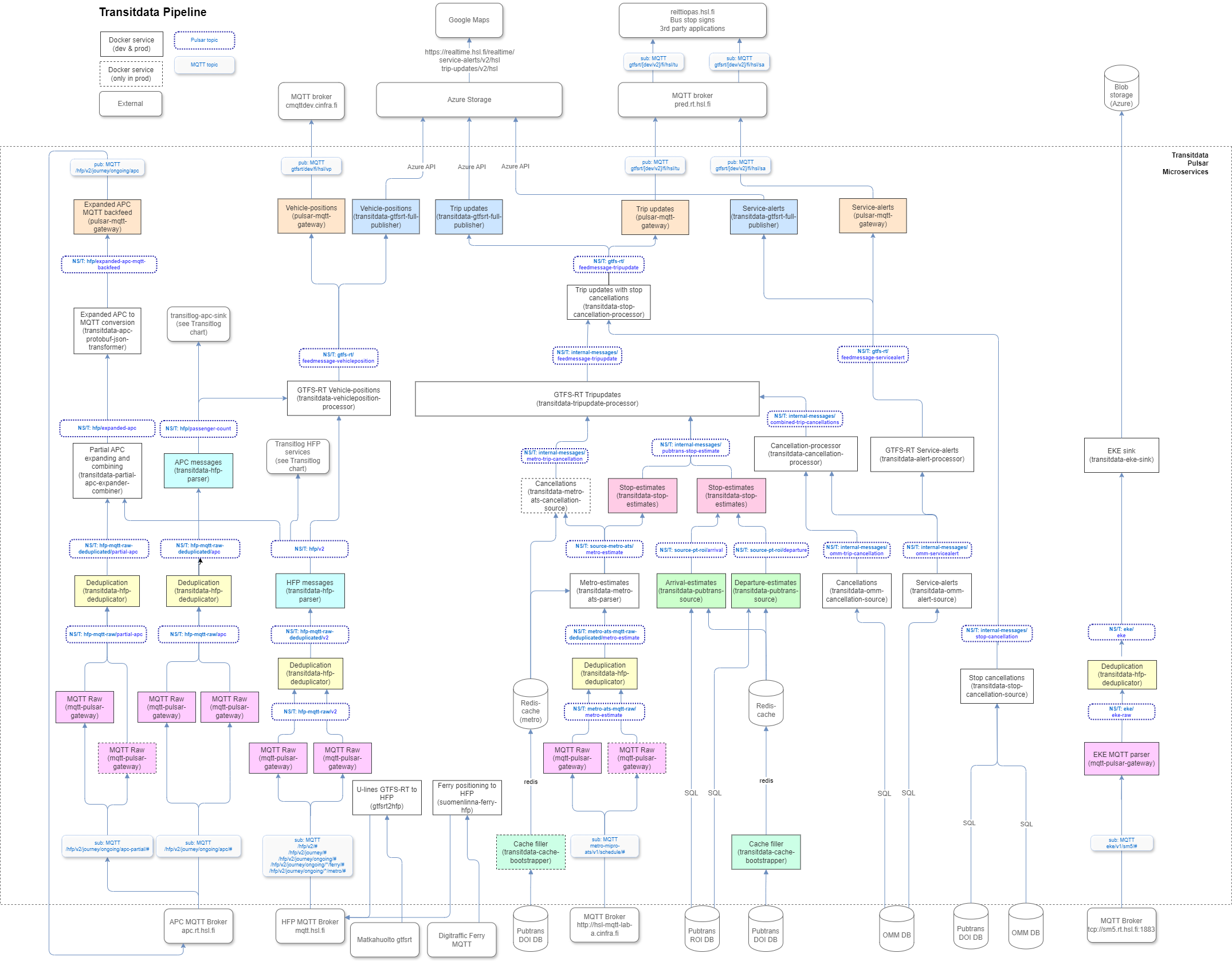 The output MQTT brokers visible at the top edge of the diagram. The one on the left
The output MQTT brokers visible at the top edge of the diagram. The one on the left 
 paulswartz
paulswartz eliasmbd
eliasmbd isabelle-dr
isabelle-dr
GTFS-rt spec current says the following about differential messages:
Based on a discussion starting in https://github.com/opentripplanner/OpenTripPlanner/pull/2516#issuecomment-350117175, differential feeds are being used in practice.
I've opened this issue to start to document behavior for deployed feeds using differential messages, with the goal of working towards a proposal/pull request to better define differential producer/consumer behavior in the GTFS-realtime spec.
In https://github.com/opentripplanner/OpenTripPlanner/pull/2516#issuecomment-350306537, @abyrd says:
If anyone else is producing/consuming differential messages, please add comments here for any design documentation for expected consumer/producer behavior.