 hasauino
commented
5 years ago
hasauino
commented
5 years ago Hi chbloca,
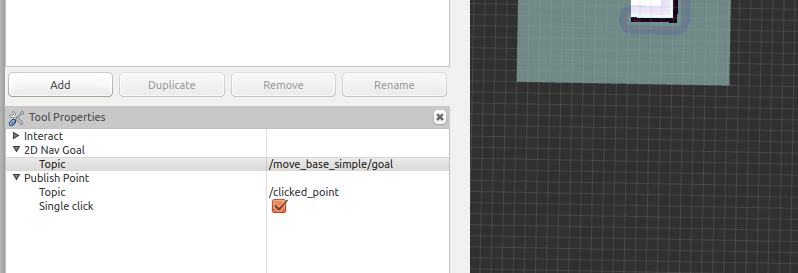
I would first check the topic names on which Rviz publishes clicked points, which you use to define the area. The global and local detectors expect the points to be published on /clicked_point. This topic is by default the topic name Rviz publishes any clicked point. Most likely this is not your problem.
The second thing you need to check, whether you visualize Markers on Rviz. The detectors publish Marker messages on /global_detector_shapes and /local_detector_shapes.
I have added a launch file in the rrt_exploration_tutorials package, for launching a robot without name prefix. It uses a Rviz config file to visualize everything correctly. You may need to make changes according to your topic names.
For example, the laser scan topic name of yours is different. You may optionally change it to /base_scan, Or modify the Rviz config file, line 242. (but this is not necessary, only if you wish to visualize the laser scans)
If the problem still persists, can you show me all the topic names when you run your system?
 christenbc
christenbc





Hello Hasauino. I am trying to test your package in an industrial mobile robot as part of my thesis. Here, this device launches the navigation stack automatically so the case is slightly different. I managed to run gmapping and it does without problems. So, at this point as everything is set up properly I am trying to launch your package.
I saw that you made the proper modifications for a unique robot so I don't need to make any modifications and mappings of the topics related with robot_1.
So what I've tried so far the following procedure:
From the mir_robot which provides IP bridging, remapping and removing of topics,... stuff that makes possible a good connection between my computer and the robot.
roslaunch mir_driver mir.launch disable_map:=trueNow I roslaunch this launcher I have created to execute gmapping, rviz and setting use_sim_time = false:
And finally the last thing I do is:
roslaunch rrt_exploration simple.launchThe problem comes when I try to publish the points in RViz, there won't appear any of them RViz so they won't be published and your algorithm won't run. What am I doing wrong?