 xuankuzcr
commented
1 year ago
xuankuzcr
commented
1 year ago Thanks for your interest and testing! The extrinsic_R in avia_resize.yaml doesn't have to be an identity matrix.
Rcl represents the rotation matrix of LiDAR frame w.r.t. Camera frame.
Pcl represents the translation of LiDAR frame w.r.t. Camera frame.
extrinsic_R represents the rotation matrix of LiDAR frame w.r.t. IMU frame.
extrinsic_T represents the translation of LiDAR frame w.r.t. IMU frame.
If you set them correctly according to the physical meaning, there should be no wrong alignment of the image and LiDAR scan.
Additionally, you need to change the camera's projection model to adapt to the Hilti dataset.
 kekeliu-whu
kekeliu-whu nuyhead-hwang
nuyhead-hwang Camilochiang
Camilochiang
Thank you for your great contribution!
I am testing hilti2021 dataset on FAST-LIVO which contains a livox mid70, an embeded IMU and a 1440x1080 10Hz global shutter camera.
I find that when I write really extrinsic parameters on the left which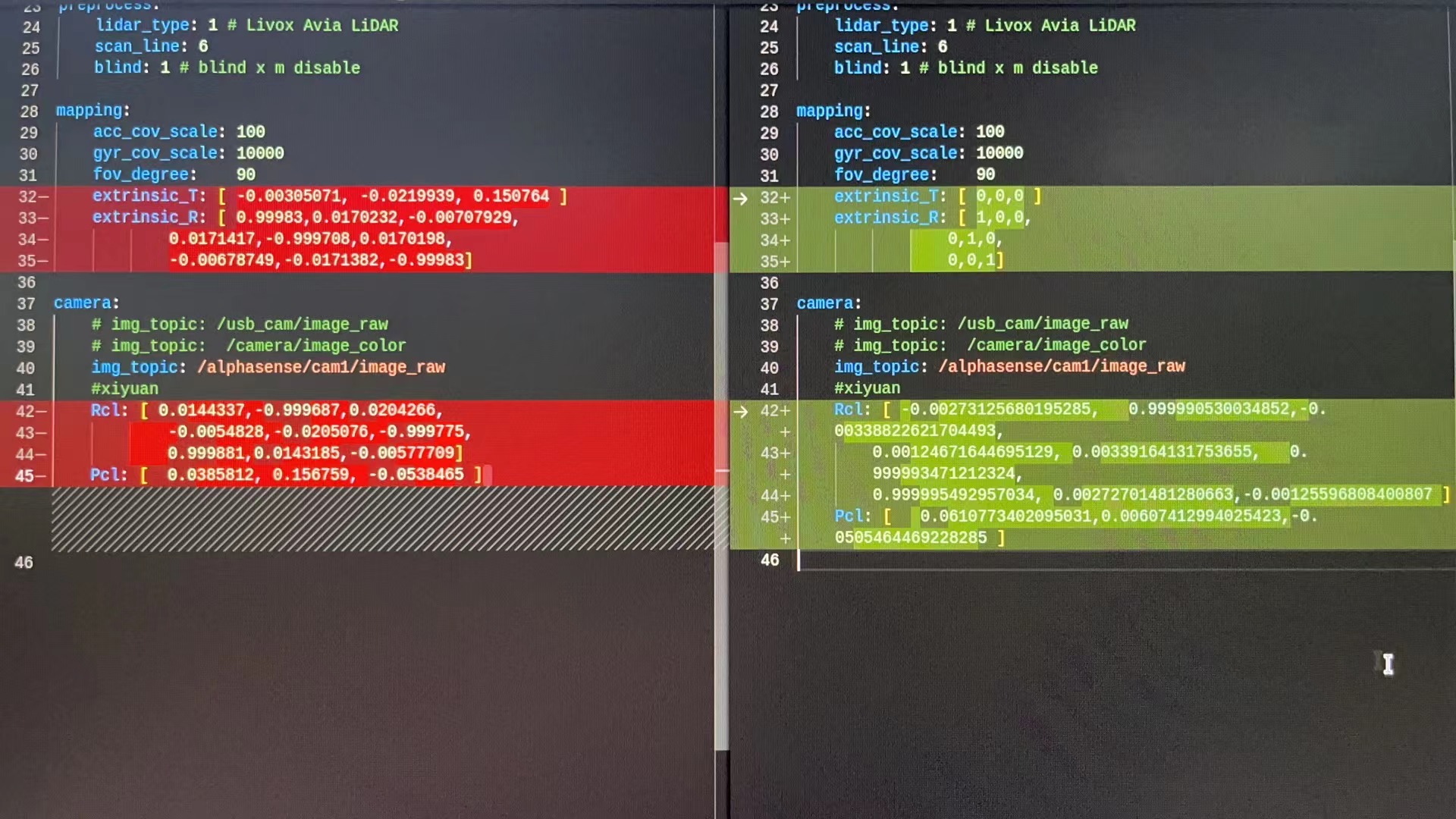
extrinsic_Ris not identity, FAST-LIVO will result in bad initialization showing that image is not aligned with livox scan.So I make some changes to force lidar and imu into one frame:
I would like to know if extrinsic_R in avia_resize.yaml must be identity?