 matlabbe
commented
1 year ago
matlabbe
commented
1 year ago In rviz, use rtabmap_ros/MapCloud display (on /rtabmap/mapData topic) instead of a PointCloud2 display. The rtabmap/cloud_map topic contains very downsampled point cloud for occupancy grid. In your second screen shot, you can see the point cloud in rtabmapviz has more points than in rviz. You should get something similar in rviz with MapCloud rviz display. You can then adjust the decimation value (default 4) to show more or less points. Don't use subscribe_scan_cloud with point cloud generated from cameras (unless they are TOF cameras), it is mainly used for 3D lidars.
 khuechuong
khuechuong

 Myzhar
Myzhar
Basically, I am using a zed mini and using their ROS package. I use ubuntu 20.04, ros noetic, ros1, with a gtx 1080 gpu. I follow the installation instruction: https://www.stereolabs.com/docs/ros/ And I used rtabmap ros. In the beginning, both rtabmapviz and rviz wasn't that good as seen here.
RVIZ with _/zed/zed_node/point_cloud/cloudregistered topic: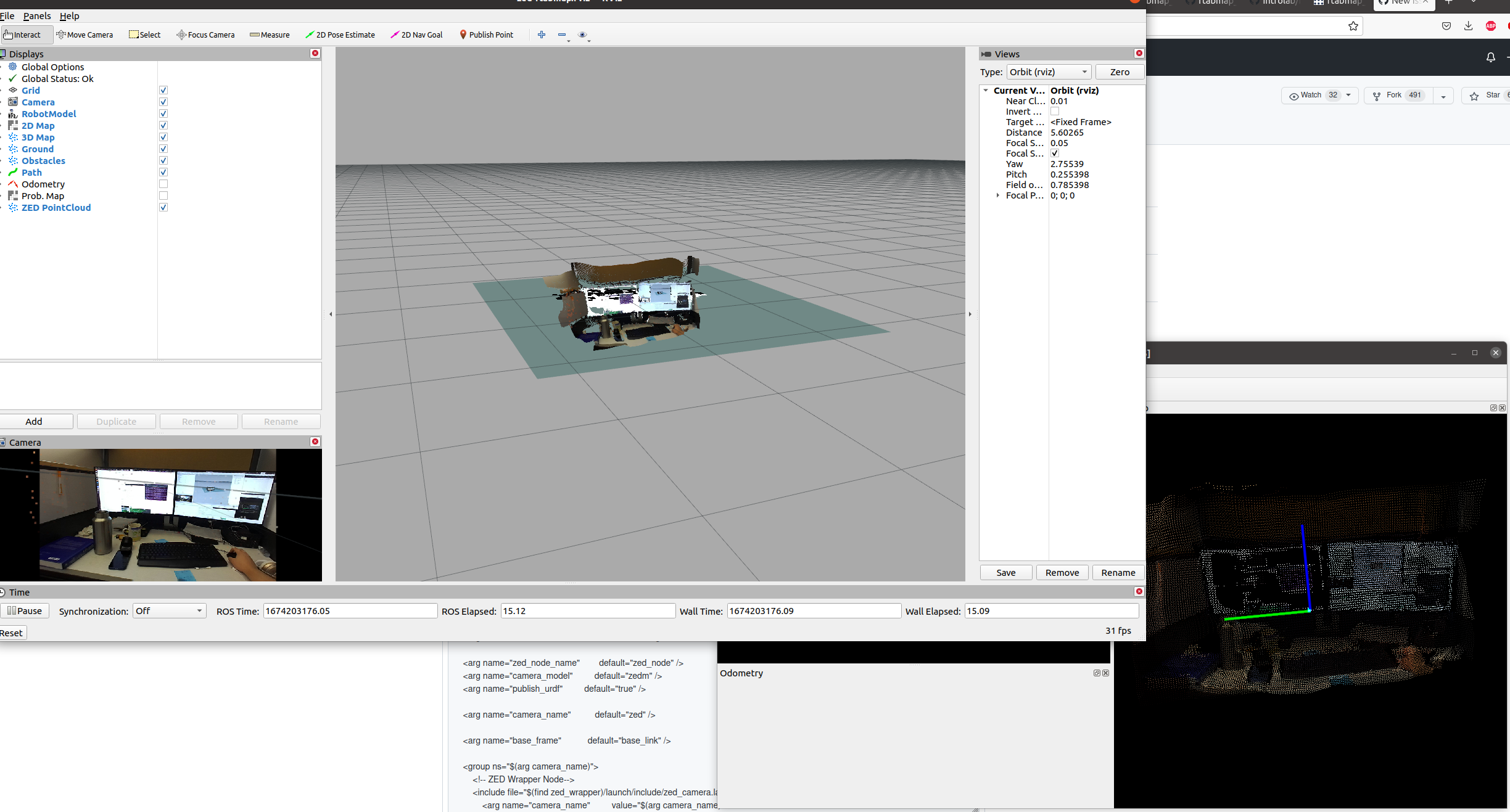
RVIZ without _/zed/zed_node/point_cloud/cloudregistered topic:
So I changed the param _subscribe_scancloud to true and add
zed_rtabmap.launch
<?xml version="1.0"?>
sl_rtabmap.launch.xml
rtabmap.yaml subscribe_depth: true subscribe_rgbd: false subscribe_stereo: false subscribe_stereo: false subscribe_scan: false subscribe_scan_cloud: true subscribe_user_data: false subscribe_odom_info: false
database_path: "~/.ros/rtabmap.db" config_path: "~/.ros/rtabmap.cfg"
frame_id: "base_link" map_frame_id: "map" odom_frame_id: "odom" # odometry from odom msg to have covariance - Remapped by launch file odom_tf_angular_variance: 0.001 # If TF is used to get odometry, this is the default angular variance odom_tf_linear_variance: 0.001 # If TF is used to get odometry, this is the default linear variance tf_delay: 0.02 publish_tf: false # Set to false if fusing different poses (map->odom) with UKF
odom_sensor_sync: true wait_for_transform_duration: 0.2 approx_sync: true
queue_size: 100
scan_normal_k: 0
Grid: 3D: true FlatObstacleDetected: true MapFrameProjection: false GroundIsObstacle: false PreVoxelFiltering: true RayTracing: true FromDepth: true NormalsSegmentation: false CellSize: 0.05 ClusterRadius: 0.1 MinClusterSize: 3 DepthDecimation: 1 DepthRoiRatios: [0.0, 0.0, 0.0, 0.0] FootprintHeight: 2.0 FootprintLength: 0.18 FootprintWidth: 0.18 MaxGroundAngle: 30.0 MinGroundHeight: -0.5 MaxGroundHeight: -0.4 MaxObstacleHeight: 0.1 NoiseFilteringMinNeighbors: 5 NoiseFilteringRadius: 0.1 NormalK: 20 RangeMin: 0.7 RangeMax: 3.0
GridGlobal: Eroded: false # Erode obstacle cells FootprintRadius: 0.18 # Footprint radius (m) used to clear all obstacles under the graph FullUpdate: true # When the graph is changed, the whole map will be reconstructed instead of moving individually each cells of the map. Also, data added to cache won't be released after updating the map. This process is longer but more robust to drift that would erase some parts of the map when it should not MaxNodes: 0 # Maximum nodes assembled in the map starting from the last node (0=unlimited) MinSize: 1.0 # Minimum map size (m) OccupancyThr: 0.55 # Occupancy threshold (value between 0 and 1) ProbClampingMax: 0.971 # Probability clamping maximum (value between 0 and 1) ProbClampingMin: 0.1192 # Probability clamping minimum (value between 0 and 1) ProbHit: 0.7 # Probability of a hit (value between 0.5 and 1) ProbMiss: 0.4 # Probability of a miss (value between 0 and 0.5) UpdateError: 0.01 # Graph changed detection error (m). Update map only if poses in new optimized graph have moved more than this value
Here's a picture of what it looks like:
RVIZ with _/zed/zed_node/point_cloud/cloudregistered topic:
RVIZ with _/zed/zed_node/point_cloud/cloudregistered topic:
As you can see, in rtabmapviz, the quality improved drastically, but rviz mapping mapping points barely had anything. I don't really understand why. Any thought and help is appreciated. Let me know if you have any questions. Thank you!