lschirmbrand
commented
2 years ago
lschirmbrand
commented
2 years ago Hello, I'm having the same problem (#5417), have you found a workaround/solution for this?
Open louxibai opened 2 years ago
lschirmbrand
commented
2 years ago Hello, I'm having the same problem (#5417), have you found a workaround/solution for this?
 noivanov1
commented
2 years ago
noivanov1
commented
2 years ago Hello! I have the same problem. However, it works fine for other (about 5) similar point clouds, the only difference is in the rotation along the vertical axis. Is there still no solution to that problem?
noivanov1
commented
2 years ago louxibai, lschirmbrand, I've found work around this problem. I slice numpy array of my point cloud and keep only x, y axis. Then I follow this instruction and built oriented bounding box on 2D plane. After that I restore my z values and built 3D bounding box with maximum and minimum values of z. Hope this helps you.
Checklist
masterbranch).My Question
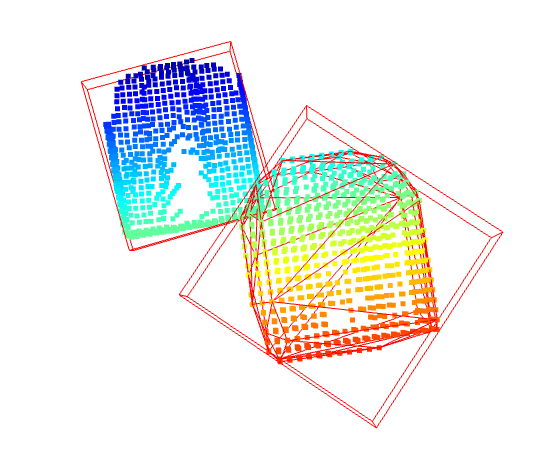
Hi, I have a partial point cloud, and a point cloud of better quality. However, when I run the oriented bounding box by calling pcd.get_oriented_bounding_box(robust=True), and visualize the results for both point clouds, the estimation for the better point cloud are even worse than the more partial-viewed cloud. I'm curious about how this is happening. Any suggestions and ideas are greatly appreciated!