 Ghul-huan
commented
1 year ago
Ghul-huan
commented
1 year ago yeah ,i meet the same problem
Open mwdotzom opened 1 year ago
Ghul-huan
commented
1 year ago yeah ,i meet the same problem
 philippwulff
commented
8 months ago
philippwulff
commented
8 months ago model_zoe_k should be the one to choose here. However, model_zoe_n and model_zoe_k gave results of around 1m ~ 7m, only model_zoe_nk gave 7m ~ 65m
Yeah, I am also seeing this...
 toannguyen1904
commented
6 months ago
toannguyen1904
commented
6 months ago any solution to tackle this, I meet the same problem :((
Hello @thias15 @shariqfarooq123 , thank you for the great work!
I met two problems when inferring the models in outdoor car scenes:
According to your description,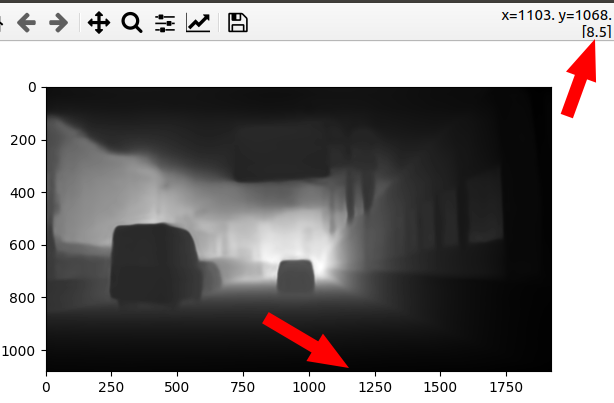 Something also worth mentioning is that the sky have pred results almost the same as the ground, which could be observed easily in the picture. This only happens in
Something also worth mentioning is that the sky have pred results almost the same as the ground, which could be observed easily in the picture. This only happens in
model_zoe_kshould be the one to choose here. However,model_zoe_nandmodel_zoe_kgave results of around 1m ~ 7m, onlymodel_zoe_nkgave 7m ~ 65m, while gt is 1m ~ 80m. The latter is barely satisfactory for car instances within 10 ~ 40m(<2m error), however at close and far ranges the results seem remote from reality, for example the car front of the camera itself at 8.5m, and a distant car at gt = 65.8m with pred = 44.6m. The original RGB image can be downloaded here.model_zoe_nkwithmode="eval". Do you have any insights on how to improve the metric predictions at close and far distances? Would further training on datasets work? (yet what way could be beneficial given that it's already trained on 12 datasets...)As described similarly in issue #28, I tried both default mode ('infer') and
mode="eval", but got same results. Could you provide a detailed example of the correct way to do it withtorch.hub.load()?Thank you for your time! :D