jasonkyuyim
commented
1 year ago
jasonkyuyim
commented
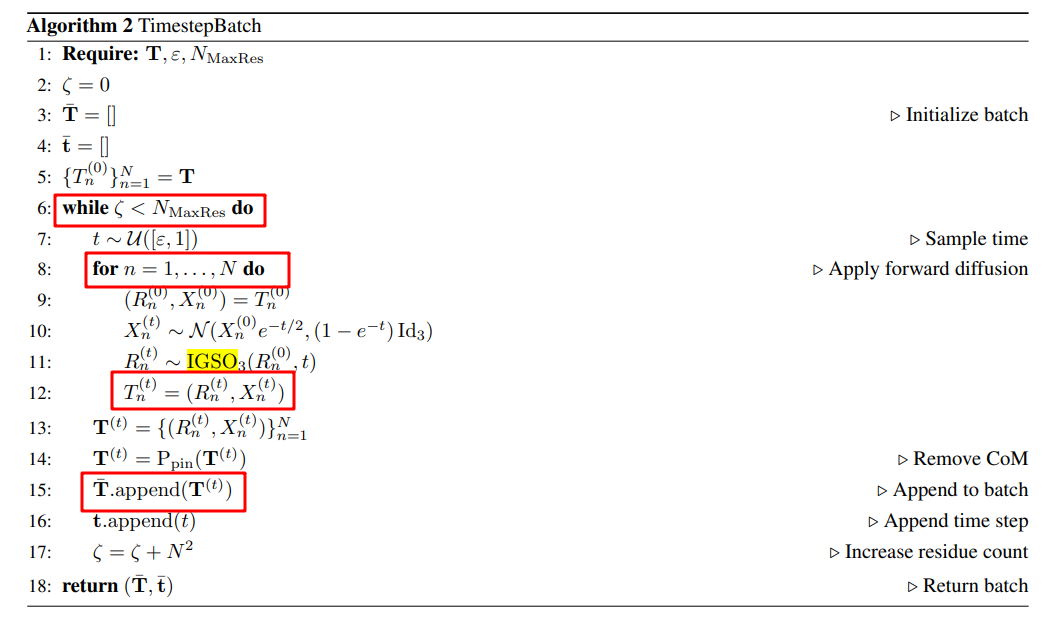
1 year ago Hello, the code performs lines 8-12 by sampling the noise in batches https://github.com/jasonkyuyim/se3_diffusion/blob/master/data/r3_diffuser.py#L134 Note that N is the length of the protein.
 jiaweiguan
jiaweiguan
Hi! In the code, I found that diffusion only adds noise once. How to realize multiple times and then denoise? Screenshot from the original paper