 jc-bao
commented
1 year ago
jc-bao
commented
1 year ago :one: Identify research questions
possible issues:
-
multi-dynamic model-free RL: (not very important)
- how to better integrate information
- performance given residue dynamics.
- guarantee given new environment -> model-based approach, understand the optimization process.
-
:star: Inference-based adaptation module:
-
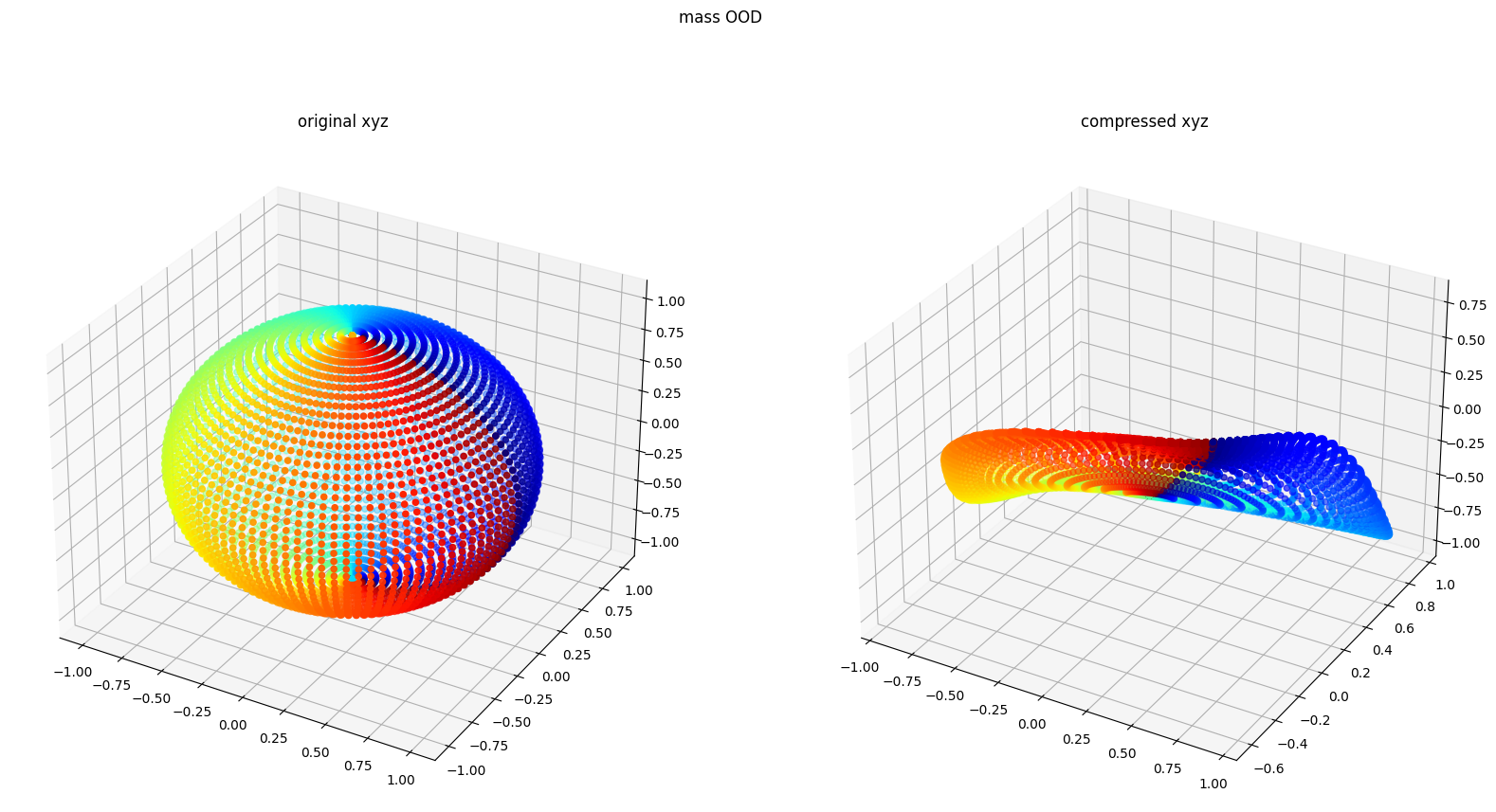
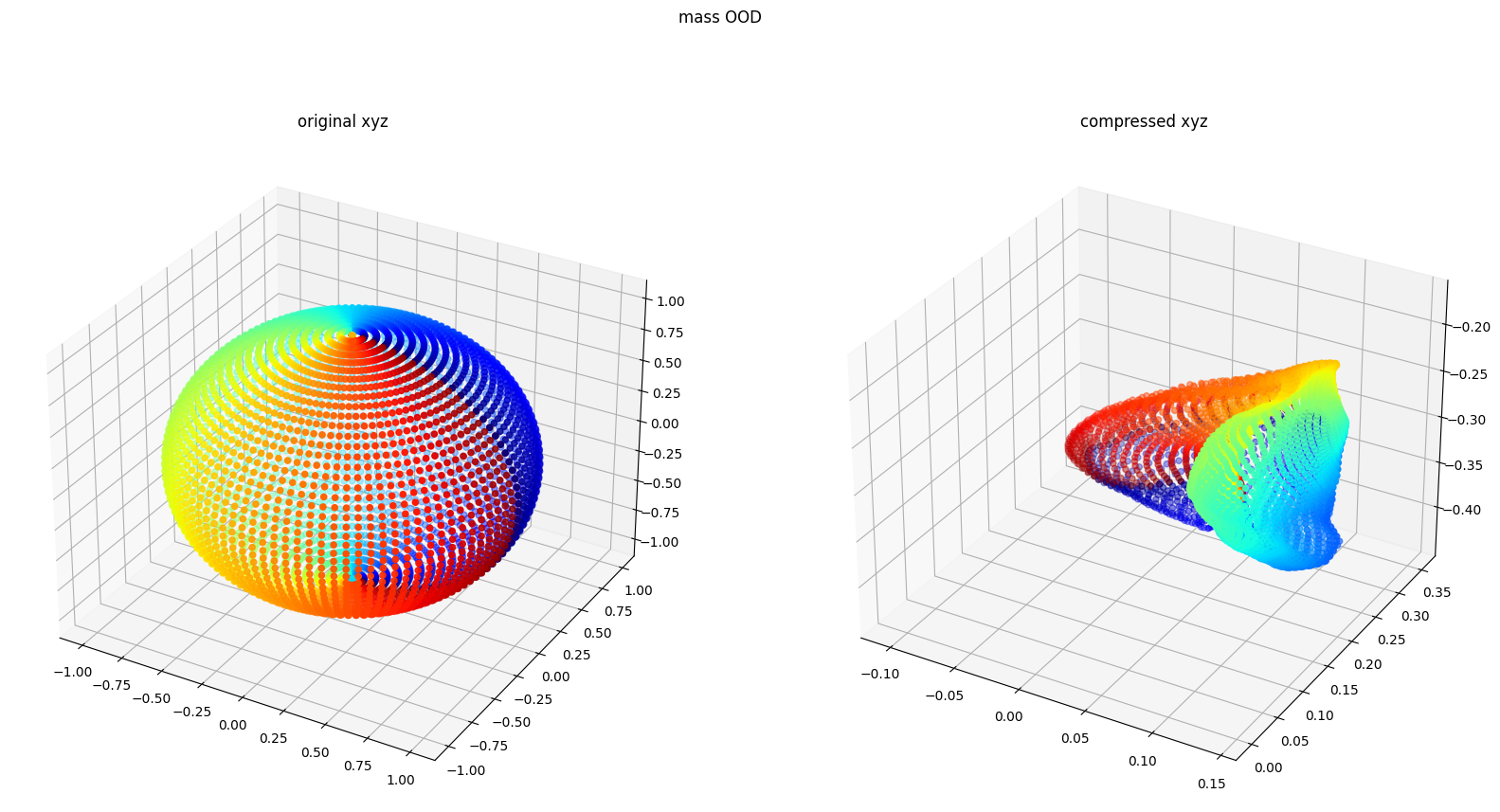
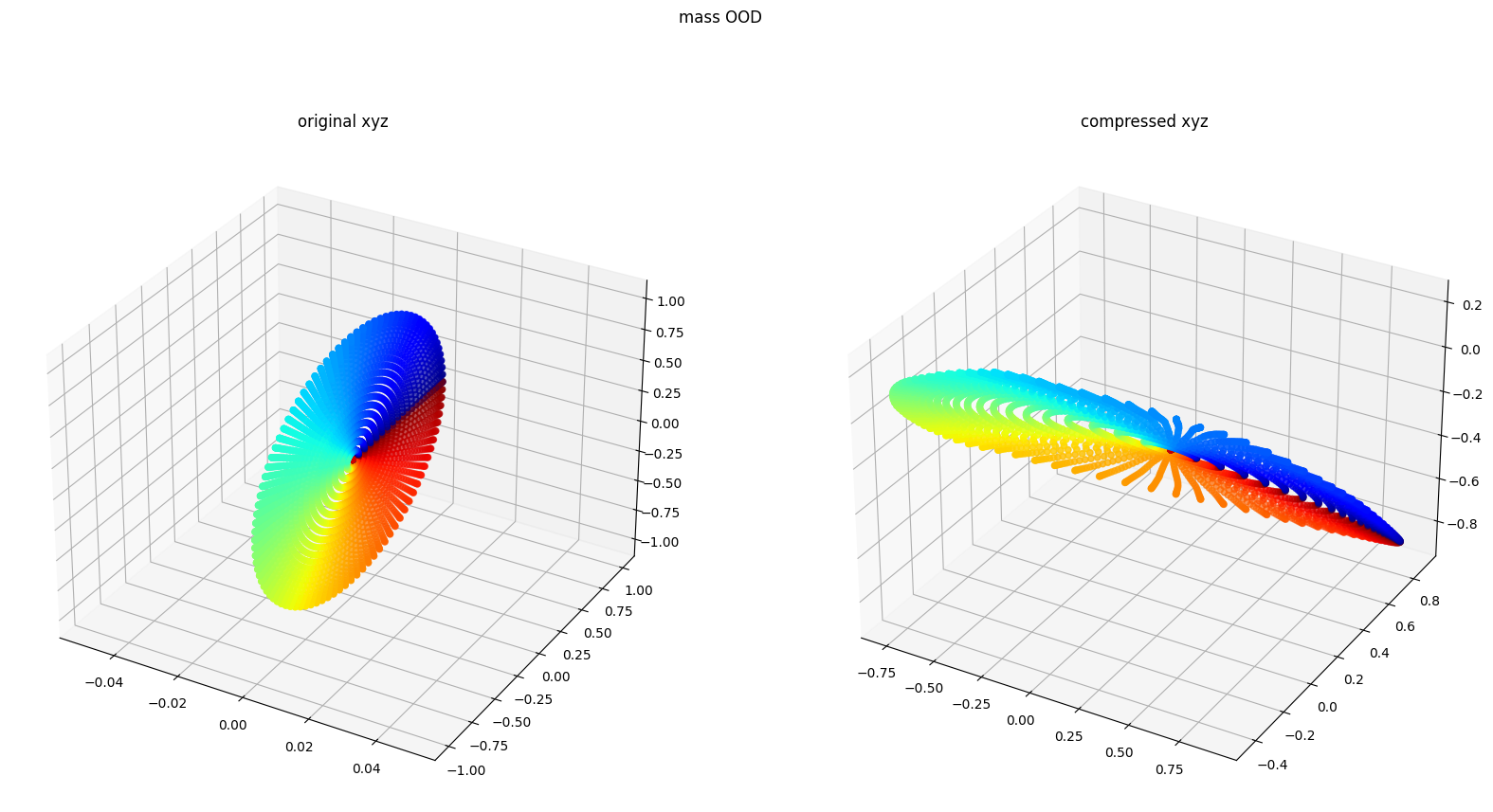
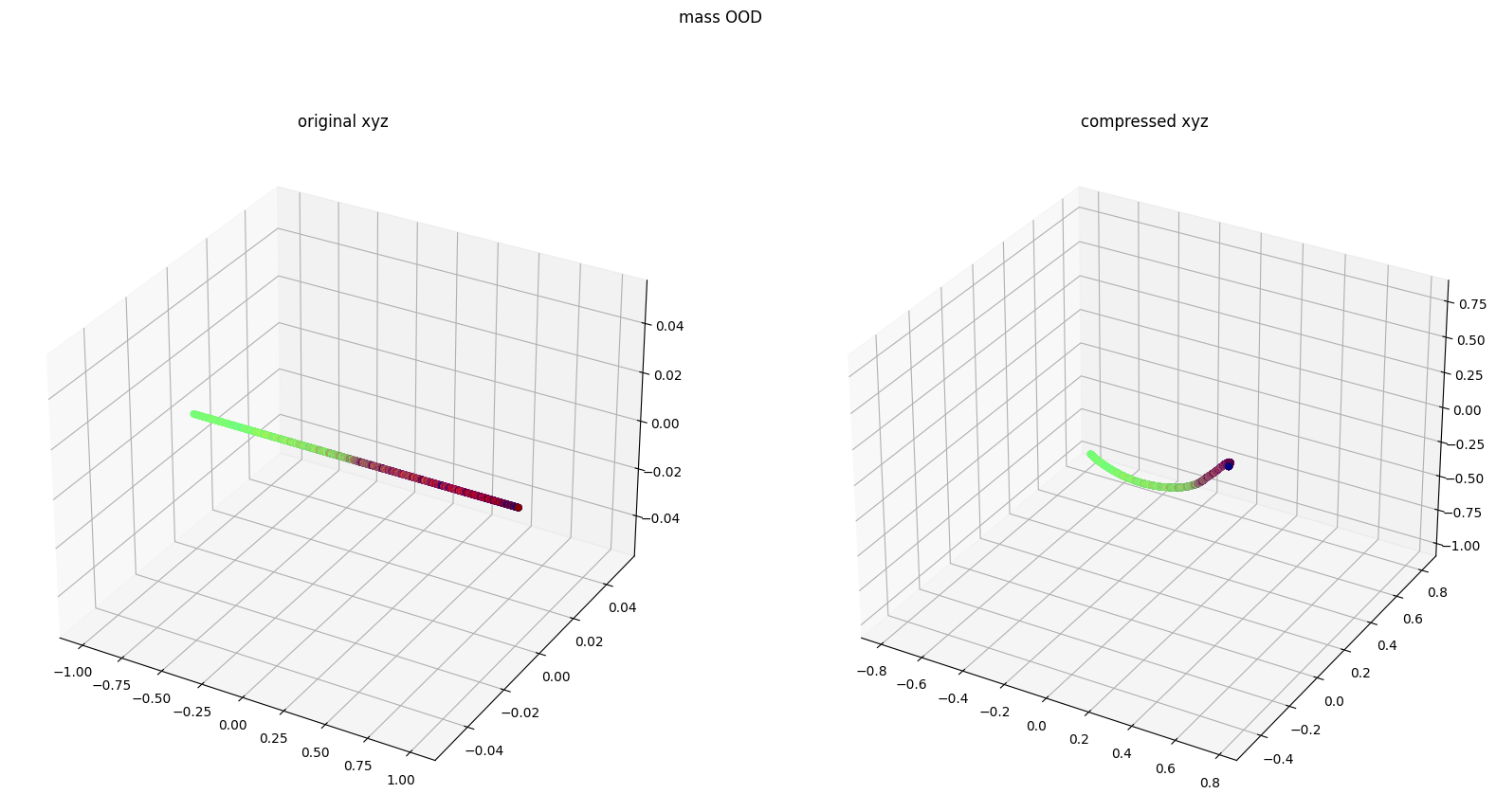
Generalizability given model mismatch (OOD) -> introduce another optimization method
-
Feedback given imprecise estimation -> introduce a method to identify the problem
-


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
This issue is used to keep a record of the research emphasis and engineering effort of each research period.