 ManuelZ
commented
1 year ago
ManuelZ
commented
1 year ago I also saw the fourBarMechanismRedundant.py example file but couldn't figure out what was the gist of it. I see it as the classical example of when the Grübler–Kutzbach criterion fails, due to a redundant constraint, but I don't see anyting in particular that makes this example able to run without trouble. How can it run if there are redundancies?
 jgerstmayr
jgerstmayr
I want to re-create the following mechanism in 3D: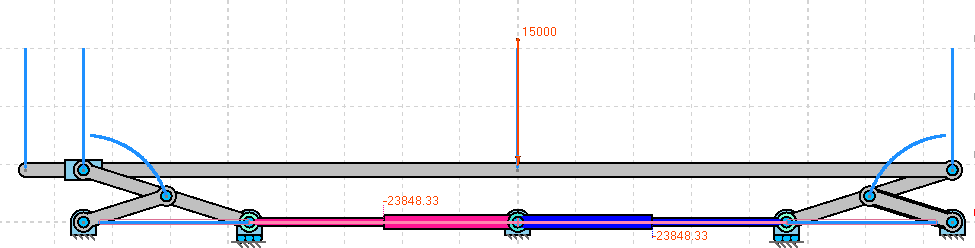
It's a double Scott-Russell mechanism which has, in addition to the sliding joints at the bottom, one sliding joint at the top, between the left large diagonal bar and the slider which is connected to the platform. (I think this way I get no redundant constraints in 2D? At least the software that I'm using stopped complaining after that).
I got this so far (in 3D):
Currently it's simulating like this (notice the disconnected bottom slider and the left large bar):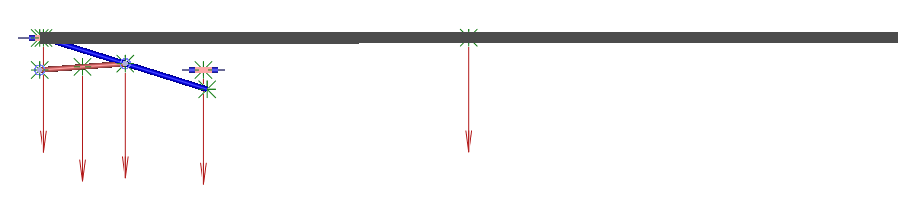
If I add a revolute joint between the bottom slider and the large bar, I get:
Using either of these options allows me to continue the simulation: (but I guess the obtained forces and torques may end up varying across simulation runs?)
I'm interpreting this problem as follows: some of the constraints added by this revolute joint end up being redundant with the ones added by the sliding joint that's present at the same location. The joints present at that point are these: a prismatic joint between the ground and the slider and a revolute joint between the slider and the left large bar.
1) Am I correct into thinking that this may be he cause of the problem? What could I do to get around this? Maybe replacing one of those joints with a
GenericJointwith less constraints?2) Could I use
ObjectKinematicTreehere? I'm referring to it because I saw "closed loop mechanisms" in theObjectKinematicTreedocumentation and sounded relevant.I'm severely lacking theory here, sorry about that.