horverno
commented
2 years ago
horverno
commented
2 years ago hi @LuYoKa
Our dataset is not preprocessed. Try to tune the params according the publication. Hope this helps.

Closed LuYoKa closed 2 years ago
horverno
commented
2 years ago hi @LuYoKa
Our dataset is not preprocessed. Try to tune the params according the publication. Hope this helps.
 dobaybalazs
commented
2 years ago
dobaybalazs
commented
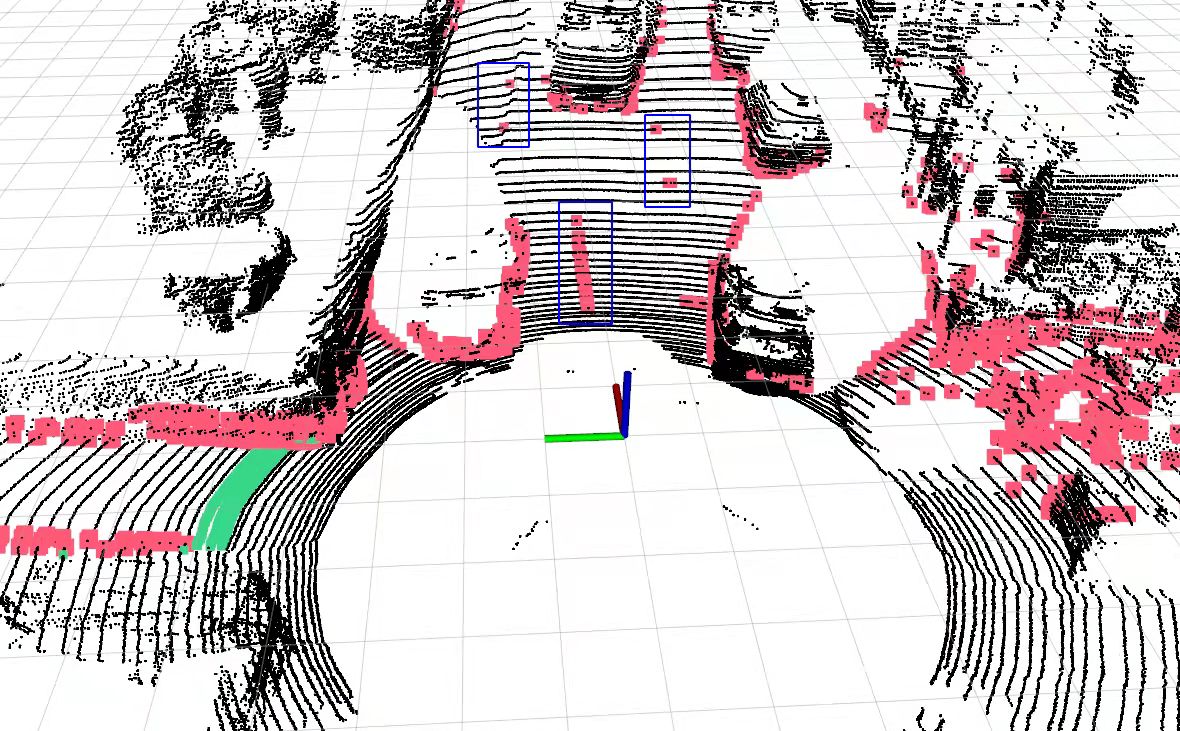
2 years ago Thanks for your great work! I try to do some experiment on kitti dataset. But I found it does not have the same effect as yours. The blue marks, as shown in the following image, are false positive. I want to wonder if the given dataset have a preprocessing?
Hello @LuYoKa Have you changed the interval parameter?
 crankler
commented
2 years ago
crankler
commented
2 years ago Hi, same question, @LuYoKa , @dobaybalazs I tried and can't get a good params cfg here, have you succeed to split the curb in kitti dataset?
dobaybalazs
commented
2 years ago Hello @crankler , Could you send the link to the kitti dataset you tried the algorithms on? On another note:The default parameters are set in a way,so that the algorithms can perform most efficiently on the rosbags we recorded at our campus. Fortunately, there are countless datasets which they can be tried on, but some of those sets will contain some special characteristics which will require the adjustment of certain params. The only suggestion I can give you is to try different combinations of values and see how they effect the output and try to understand them accordingly. That way, you will get a better idea of the reasonable intervals from which a param can get a value from in the given environment. (And there is also the paper.)
crankler
commented
2 years ago Yes, thank you for your reply, I test on kitti odom dataset 09, the link is here: http://www.cvlibs.net/datasets/kitti/eval_odometry.php
Recently, I have tested a few params, but it's not performer well, so I try to transform your "x_zero_method" and "z_zero_method" method in my code. For the terrain have slope and cross, so I still test different method to get a good results. It's interesting to see you can show in different dataset, best wishes!
dobaybalazs
commented
2 years ago Yes, thank you for your reply, I test on kitti odom dataset 09, the link is here: http://www.cvlibs.net/datasets/kitti/eval_odometry.php
Recently, I have tested a few params, but it's not performer well, so I try to transform your "x_zero_method" and "z_zero_method" method in my code. For the terrain have slope and cross, so I still test different method to get a good results. It's interesting to see you can show in different dataset, best wishes!
It is interesting indeed, and it is awesome that you have been experimenting with the code itself. Thank you for sending the link, I will test the algorithms on the dataset myself and see if I can manage to find the optimal params. Until then, best wishes to you as well.
Thanks for your great work! I try to do some experiment on kitti dataset. But I found it does not have the same effect as yours. The blue marks, as shown in the following image, are false positive. I want to wonder if the given dataset have a preprocessing?