 k-okada
commented
8 years ago
k-okada
commented
8 years ago 1. ペッパーのカメラつかっている?それとも追加でつけたデプスセンサ? ペッパーのカメラのデプスはこのまえみたみたいにガタガタ.(そういえば,あの画像をキャプチャしてくれると嬉しい) 治そうとしているんだけど,たぶん,naoqiでデータを取ってる時か,データを送るときにjpeg圧縮しているんじゃないかと思うんだけど,心当たりないかな?
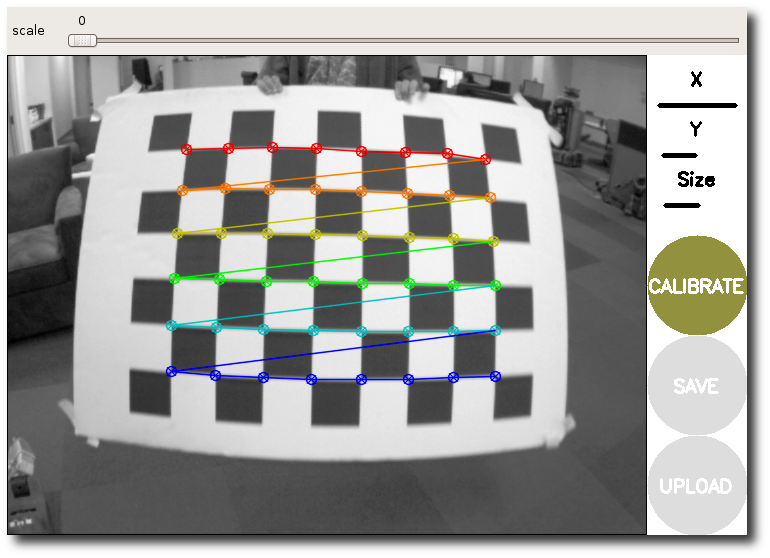
2. ずれているのは点群?それとも,点群の上のカメラの色情報? まずは色無しで点群だけで 平面が平面に見えているか? 線(柱)が線に見えているか?を確認する 色情報はここから点群の各点に色を追加している.これをregistrationという.これは色カメラのパラメータと距離カメラのパラメータから, どの点には,どの色カメラ画像の座標の色を使えばいいか,という計算して,点に色をつける.正確に言うとrectをつかわないとけない. ただ,rectとrawで http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration の http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=get&target=mono_1.png と http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=get&target=mono_2.png ぐらい違っていないと,どっちを使っても結果はそうかわらない.
◉ Kei Okada
2016-05-31 21:34 GMT+09:00 Kanae Kochigami notifications@github.com:
画像認識がうまくいかないのは,点群も原因なのかなと思いここに相談を書かせていただきます. パッケージとは関係がなく申し訳ございません.
rviz のdepth_imageを見ると以下の様になっていますが. [image: pepper_depth_image_from_rviz] https://cloud.githubusercontent.com/assets/7259671/15674129/07571a0c-2776-11e6-94dd-48223205173e.png
以下のプログラム(depth_image_procを使って点群を出す)だと,画像が曲がってしまいます.(柱が折れ曲がっている) [image: pepper_point_cloud_without_image_rect_color] https://cloud.githubusercontent.com/assets/7259671/15674229/a25cbe08-2776-11e6-8a63-81c8ae43df49.png
image_proc を使ってimage_raw ではなく,image_rect_colorを使うようにしましたが,あまり変わりませんでした. [image: pepper_point_cloud_with_image_rect_color] https://cloud.githubusercontent.com/assets/7259671/15674315/f60e8ed2-2776-11e6-82c4-bf180bb25296.png
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub https://github.com/jsk-ros-pkg/jsk_robot/issues/619, or mute the thread https://github.com/notifications/unsubscribe/AAeG3Atp0QEy8h5ULcy-qbCQtQ6ikN0kks5qHCrQgaJpZM4Iqe4I .
 kochigami
kochigami






















 furushchev
furushchev











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
画像認識がうまくいかないのは,点群も原因なのかなと思いここに相談を書かせていただきます. パッケージとは関係がなく申し訳ございません.
rviz のdepth_imageを見ると以下の様になっていますが.
以下のプログラム(depth_image_procを使って点群を出す)だと,画像が曲がってしまいます.(柱が折れ曲がっている)
image_proc を使ってimage_raw ではなく,image_rect_colorを使うようにしましたが,あまり変わりませんでした.