keyfall
commented
1 year ago
keyfall
commented
1 year ago 通道交换
因为BGR有3个颜色通道,排序是B,R,R,而RGB三个通道排序是R,G,B,把通道转换就可以把BGR换成RGB
BGR通道
b=img[,,0]
g=img[,,1]
r=img[,,2]灰度化
灰度是一种图像亮度的表示方法,将彩色图像转化成为灰度图像的过程称为图像的灰度化处理。 R=G=B的值叫灰度值 灰度值有3种方法 最大值法:取通道中最大的一个为灰度值 平均值:3个通道取平均值 加权平均:由于人眼对绿色的敏感最高,对蓝色敏感最低,因此,按下式对RGB三分量进行加权平均能得到较合理的灰度图像 Y = 0.2126 R + 0.7152 G + 0.0722 B
import cv2
import numpy as np
# Read image
img = cv2.imread("imori.jpg").astype(np.float)
b = img[:, :, 0].copy()
g = img[:, :, 1].copy()
r = img[:, :, 2].copy()
# Gray scale
out = 0.2126 * r + 0.7152 * g + 0.0722 * b
out = out.astype(np.uint8)
# Save result
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.destroyAllWindows()大津二值化法
作用是对二值化的最佳阈值进行确定
从类内方差和类间方差的比值计算得来

import cv2
import numpy as np
# Read image
img = cv2.imread("imori.jpg").astype(np.float)
H, W, C = img.shape
# Grayscale
out = 0.2126 * img[..., 2] + 0.7152 * img[..., 1] + 0.0722 * img[..., 0]
out = out.astype(np.uint8)
# Determine threshold of Otsu's binarization
max_sigma = 0
max_t = 0
for _t in range(1, 255):
v0 = out[np.where(out < _t)]
m0 = np.mean(v0) if len(v0) > 0 else 0.
w0 = len(v0) / (H * W)
v1 = out[np.where(out >= _t)]
m1 = np.mean(v1) if len(v1) > 0 else 0.
w1 = len(v1) / (H * W)
sigma = w0 * w1 * ((m0 - m1) ** 2)
if sigma > max_sigma:
max_sigma = sigma
max_t = _t
# Binarization
print("threshold >>", max_t)
th = max_t
out[out < th] = 0
out[out >= th] = 255
# Save result
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.destroyAllWindows()HSV

减色处理(色彩量化)
把每个通道的256个数值,分级变换为固定值
val = { 32 ( 0 <= val < 64)
96 ( 64 <= val < 128)
160 (128 <= val < 192)
224 (192 <= val < 256)import cv2
import numpy as np
# Read image
img = cv2.imread("imori.jpg")
# Dicrease color
out = img.copy()
#整除64,再乘以64,得到特定的4个值(64以内的余数没有了),加上初始32
out = out // 64 * 64 + 32
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.destroyAllWindows()








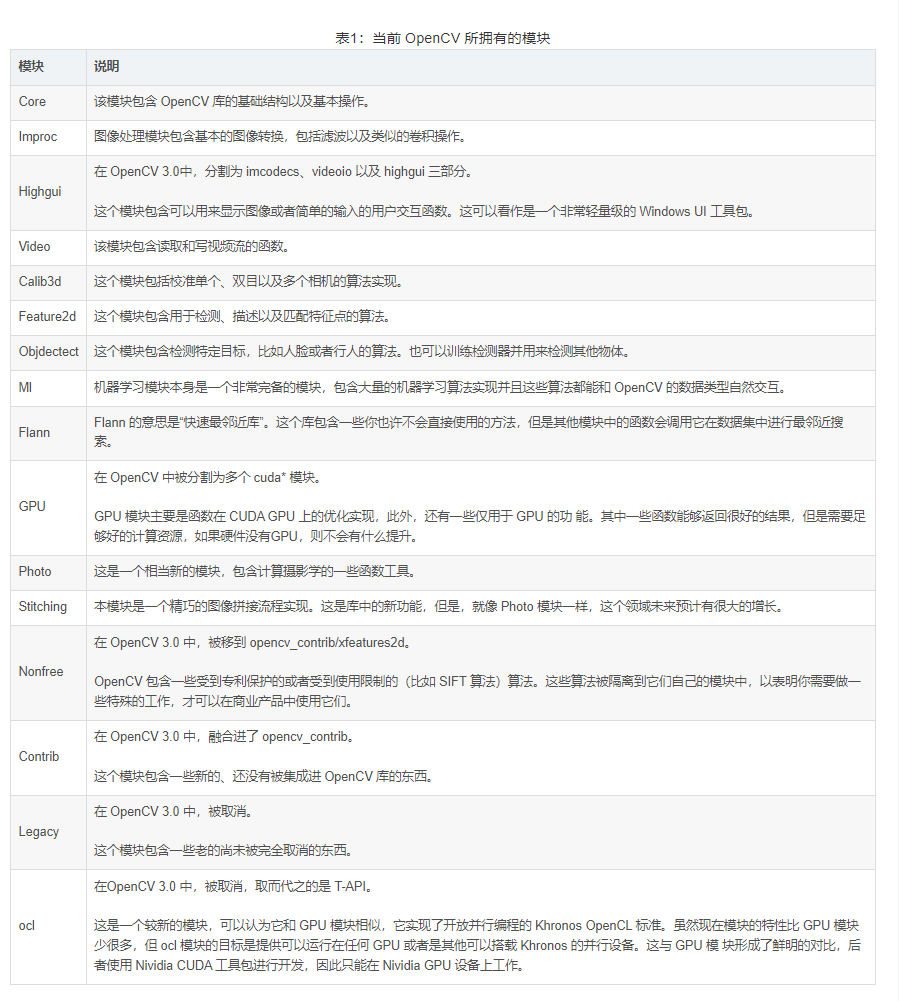
opencv模块功能