 TimWhiting
commented
11 months ago
TimWhiting
commented
11 months ago The example does not actually use non-linear control, so in this case I would hope that Koka compiles it directly to a linear handler even though it is marked ctl. Apparently it does not? Frank might be doing a similar optimization. So this benchmark might be testing the ability to optimize linear behavior rather than actually testing non-linear behavior. To get a good benchmark comparison consider creating an example with actual non-linear control characteristics.
 jasigal
jasigal
The problem
The following Koka code is quadratic w.r.t.
iters:see this graph and quadratic-results.txt which was produced with the Furthermore, if I take
Furthermore, if I take
hyperfineprogram.iterstoo high, for example 100,000, I get a segmentation fault. This can increased by increasing the stack size viaulimit, so I imagine the issue is that the stack space is exceeded.Some solutions
I have found two ways to alleviate this. The first is to change the effect from
ctltofun, i.e.which results in the following graph and linear-results.txt. The second solution is to move the outer handler into the inner handler, i.e
The second solution is to move the outer handler into the inner handler, i.e
which results in the following graph and linear-results-ctl.txt.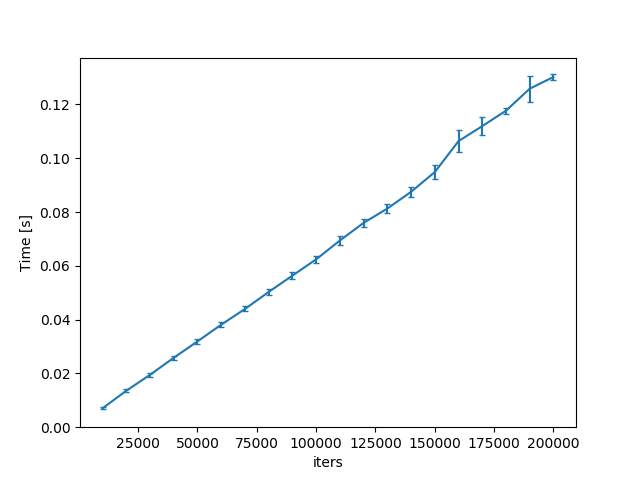
A comparison
I don't think this quadratic behaviour is intrinsically necessary. The following is (hopefully) an equivalent Frank progam to
quadraticwhich results in the following graph and quadratic-frank-results.txt.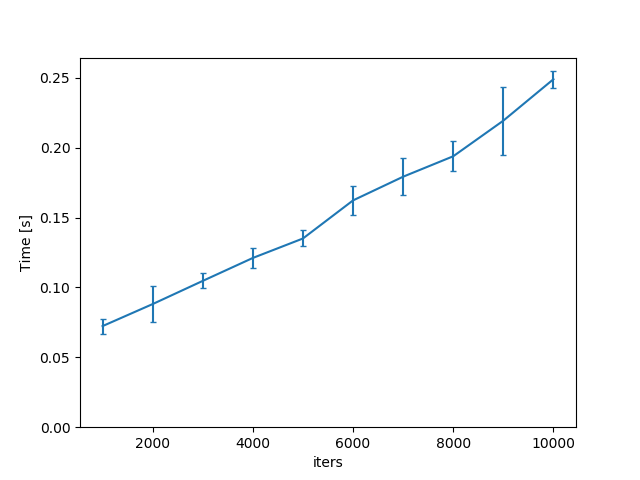
Comments
The reason I care and want this is I'm implementing automatic differentiation in Koka after doing it in Frank. I found that having multiple versions of the same effect and nesting handlers as above is useful, and I can't mark the effect as
funbecause reverse mode AD requiresctl. I also don't want to use the second solution because I lose compositionality (or at the very least I need to change the design).