 kriswiner
commented
6 years ago
kriswiner
commented
6 years ago Not like a spinning top. Move the magnetometer (sensor) in every 3D orientation possible multiple times during the calibration phase. You want to sweep out a 3D sphere with your movements. Not three orthoganal planes.
On Mon, Apr 9, 2018 at 1:25 AM, Luc-Panda notifications@github.com wrote:
Hello,
I use MPU9250 with a RFduino chip as BLE transmiter and host processor. I have some issues and question with magnetometers calibration. To calibrate them I make my IMU rotate as a top spin around the three axis then I estimate the bias and gain by ellispoid fitting. The algorithm is effective but I observe that the different ellipsoids acquired shift a lot in a few laps time (the gain as well but with less effect). I produce below acquisitions made on a two day period. [image: image] https://user-images.githubusercontent.com/34918699/38486956-db3c477e-3bde-11e8-9ddf-20c5c6010bea.png
Does anybody as the same behaviour or an idea about it?
An other question, I don't find any subject about calibrating gyroscope gain. Are they steadily and effectively calibrate by the manufacturer?
Thanks for your help and your answers.
Best regards,
Luc Thomas.
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub https://github.com/kriswiner/MPU9250/issues/264, or mute the thread https://github.com/notifications/unsubscribe-auth/AGY1qn7hkIQBtHREs97RlOf9t4eWVvynks5tmxrngaJpZM4TMIkb .
 luc-ted
luc-ted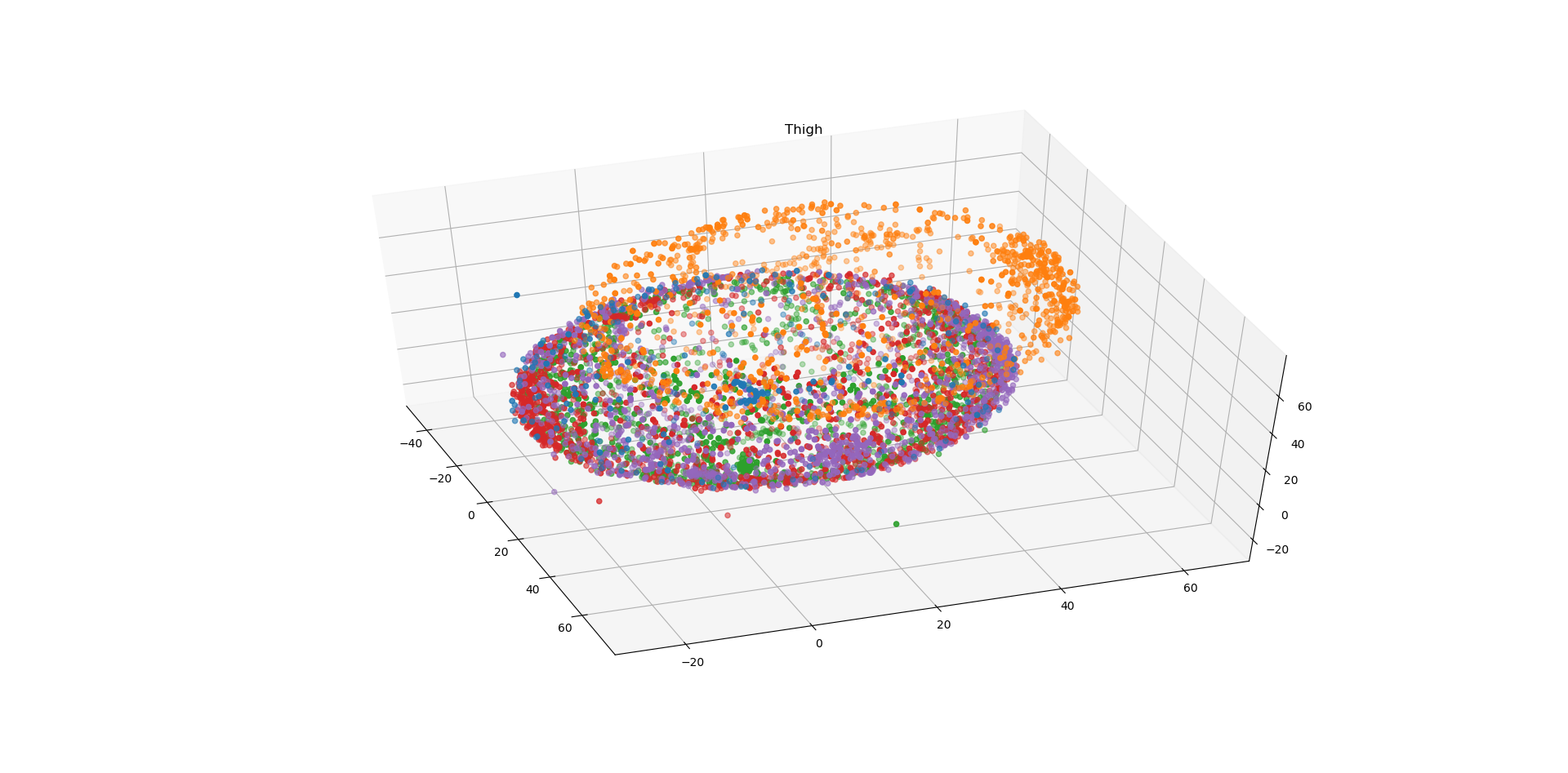{kind=link}
Hello,
I use MPU9250 with a RFduino chip as BLE transmiter and host processor. I have some issues and question with magnetometers calibration. To calibrate them I make my IMU rotate as a top spin around the three axis then I estimate the bias and gain by ellispoid fitting. The algorithm is effective but I observe that the different ellipsoids acquired shift a lot in a few laps time (the gain as well but with less effect). I produce below acquisitions made on a two day period.
Does anybody as the same behaviour or an idea about it?
An other question, I don't find any subject about calibrating gyroscope gain. Are they steadily and effectively calibrate by the manufacturer?
Thanks for your help and your answers.
Best regards,
Luc Thomas.