 kriswiner
commented
8 years ago
kriswiner
commented
8 years ago You do not need to scale the mag data, it is normalized.
-----Original Message----- From: alexx600 [mailto:notifications@github.com] Sent: November 30, 2015 10:32 AM To: kriswiner/MPU-9250 Subject: [MPU-9250] accel and magnetometer orientation (#34)
Hello! I have a few question to your MPU9250BasicAHRS.ino file.
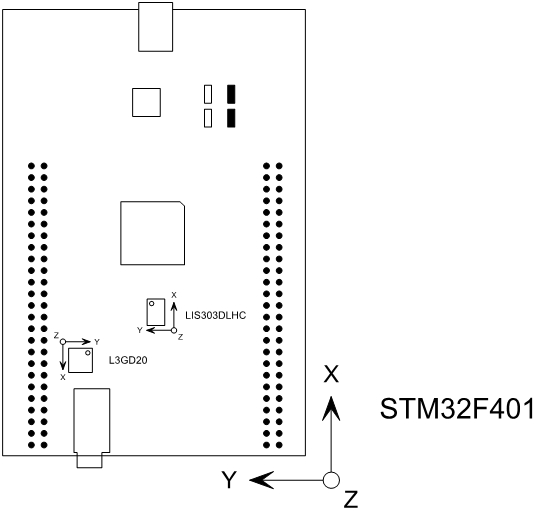
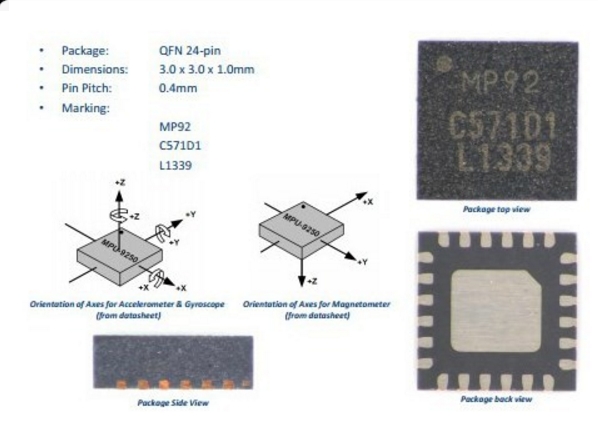
// Sensors x (y) -axis of the accelerometer is aligned with the y (x) -axis of the magnetometer; // The z-axis magnetometer (+ Down) is opposite to the z-axis (+ up) of accelerometer and gyro! // We have to make some allowance for this orientationmismatch in feeding the output to the quaternion filter. // For the MPU-9250, we have chosen a magnetic rotation sensor That keeps the forwards along the x-axis just like // in the LSM9DS0 sensor. This rotation can be modified is allow any convenient orientation convention. // This is ok to aircraft orientation standards! // Pass rate gyro as rad / s // Madgwick Quaternion Update (ax, ay, az, GX * PI / 180.0f, gy * PI / 180.0f, g * PI / 180.0f, we, x, m); Mahony Quaternion Update (ax, ay, az, GX
- PI / 180.0f, gy * PI / 180.0f, g * PI / 180.0f, we, x, m);
1.Why you did not use -mz instead of mz? I mean MahonyQuaternionUpdate (ax, ay, az, GX * PI / 180.0f, gy * PI / 180.0f, g * PI / 180.0f, we mx -mz); Why in your code mz is positive?
- Is it necessary that calculate mx,my,mz is gauss? In the filter is normalized it anyway? Or I am wrong?
Reply to this email directly or view it on GitHub https://github.com/kriswiner/MPU-9250/issues/34 . https://github.com/notifications/beacon/AGY1qktPhk5Qy79NbPJjDBJ1Eh8t7i4Wks5 pLI22gaJpZM4GrqVa.gif
 alexx600
alexx600 MatthewCochrane
MatthewCochrane{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hello! I have a few question to your MPU9250BasicAHRS.ino file.
// Sensors x (y) -axis of the accelerometer is aligned with the y (x) -axis of the magnetometer; // The z-axis magnetometer (+ Down) is opposite to the z-axis (+ up) of accelerometer and gyro! // We have to make some allowance for this orientationmismatch in feeding the output to the quaternion filter. // For the MPU-9250, we have chosen a magnetic rotation sensor That keeps the forwards along the x-axis just like // in the LSM9DS0 sensor. This rotation can be modified is allow any convenient orientation convention. // This is ok to aircraft orientation standards! // Pass rate gyro as rad / s // Madgwick Quaternion Update (ax, ay, az, GX * PI / 180.0f, gy * PI / 180.0f, g * PI / 180.0f, we, x, m); Mahony Quaternion Update (ax, ay, az, GX * PI / 180.0f, gy * PI / 180.0f, g * PI / 180.0f, we, x, m);
1.Why you did not use -mz instead of mz? I mean MahonyQuaternionUpdate (ax, ay, az, GX * PI / 180.0f, gy * PI / 180.0f, g * PI / 180.0f, my mx -mz); Why in your code mz is positive?