 kzampog
commented
4 years ago
kzampog
commented
4 years ago Hi,
I cannot spot anything particularly suspicious in that code snippet. One suggestion would be to check the sizes of targetdata, srcdata, and tfset (and e.g. check that tfset has at at least size 2). Another one would be to verify the type of tfset -- it might not be using the right allocator if it's e.g. std::vector<RigidTransform<float,3>>. If that could be the case, try changing the type of tfset to RigidTransformSet<float,3> instead (if you are not using that already). If none of the above works, I would need a minimal self-contained example (and possibly data) that reproduces the problem.
Thanks for your interest in cilantro! :D
 CarlLyt
CarlLyt
Hi , this is a awesome project, I am studying it recently. But recently there has been a problem that bothers me . I use Qt creator programming , and I created a window to display multiple point clouds together, Sometimes it runs correctly, sometimes it just quits the program after Visualizer quick popup. just like a visualizer window quick popup which no point cloud data and exit . Qt only show me : The program has unexpectedly finished. Terminal show like everything goes right : Press to close this window...
There is show window that i want
When not running successfully, it just like
This is the problematic code segment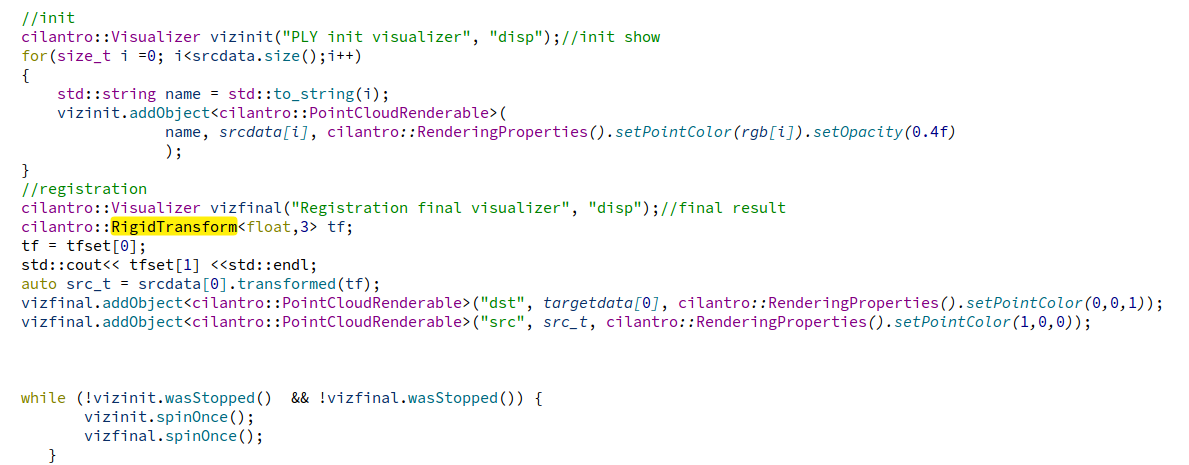
My running environment is ubuntu16 . Can you give me some suggestions? This is very uncomfortable to debug the code