EricBoiseLGSVL
commented
3 years ago
EricBoiseLGSVL
commented
3 years ago I'll ping @hadiTab but we are deprecating apollo 3.0 support and I recommend you don't use it. Why do you need navigation mode?
Closed jp12AI closed 3 years ago
EricBoiseLGSVL
commented
3 years ago I'll ping @hadiTab but we are deprecating apollo 3.0 support and I recommend you don't use it. Why do you need navigation mode?
 jp12AI
commented
3 years ago
jp12AI
commented
3 years ago @EricBoiseLGSVL I want to use navigation mode because lidar is impractical and hd maps don't make any sense from a real perspective. I figured out how to use apollo 5.0 navigation mode with a modified script so this is no longer needed anymore. Thank you
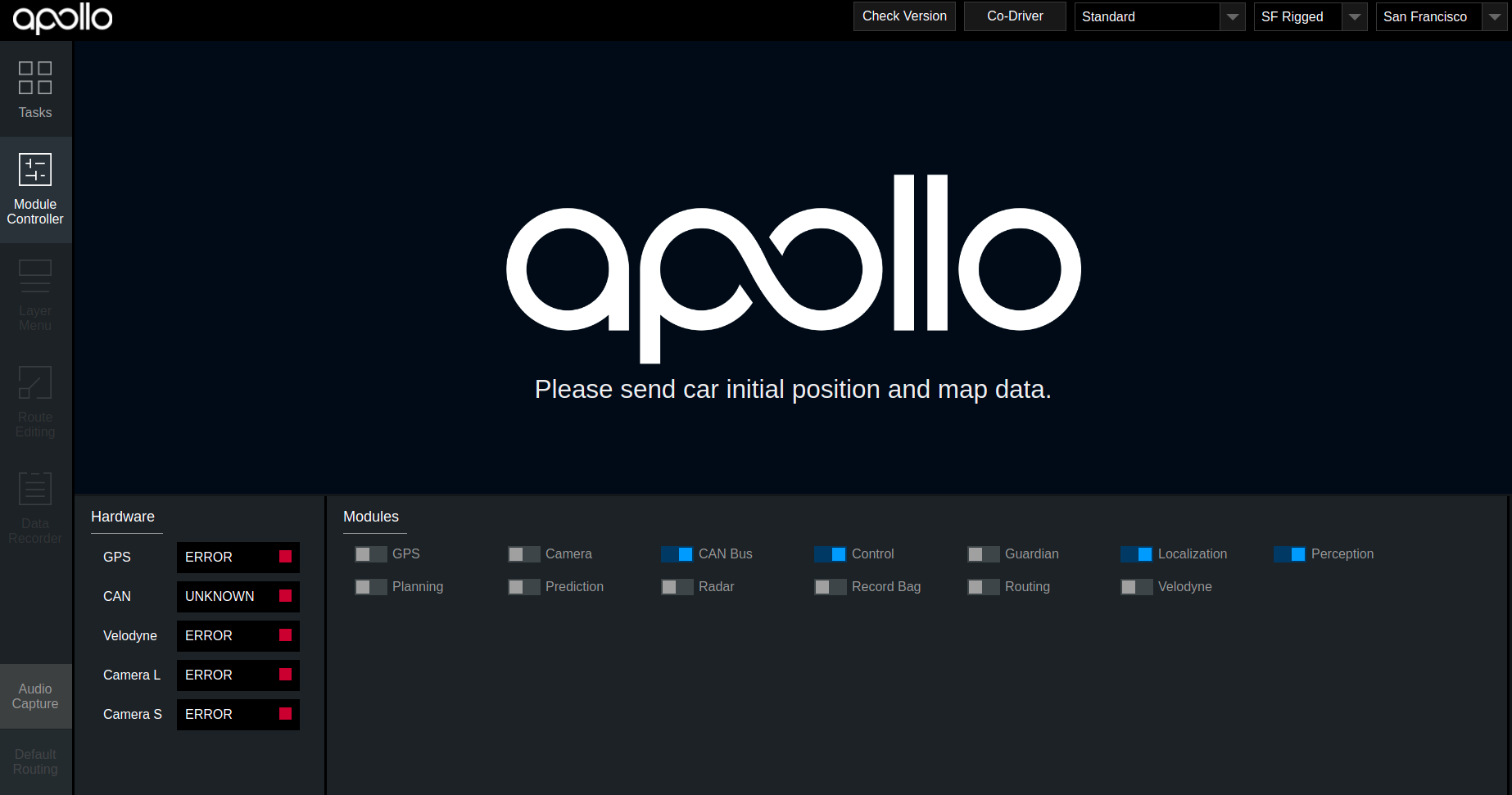
I'm trying to simulate apollo 3.0 with LGSVL to test navigation mode (which seems to only be supported up to v3). I built the lgsvl-3.0 fork, the rosbridge connection, and tried to enable the relevant modules, however, there is no car view in dreamview even when the bridge status is "connected to client". I enable the relevant modules and get into the correct mode. I also cloned the lincoln vehicle under calibration to use as a vehicle for "ROS Apollo bridge" and even though it says connected nothing appears in dreamview. Am I missing something what order should I arrange the modules, what map, what vehicle. NOTE: In the PHOTOS the old-branch of 3.0 is shown however, I have tried with the most recent version and receive the same result with the 2015 jaguar and lincoln mkz. I ultimately just want to test navigation mode and it is possible to run on newer versions however this specific mode is mostly supported with 3.0 (for now). Any help/input would be appreciated Screenshots are below. Do I need to enable sim control maybe?