martins-mozeiko
commented
5 years ago
martins-mozeiko
commented
5 years ago Can you explain more - what are you running? Which map and vehicle are you selecting?
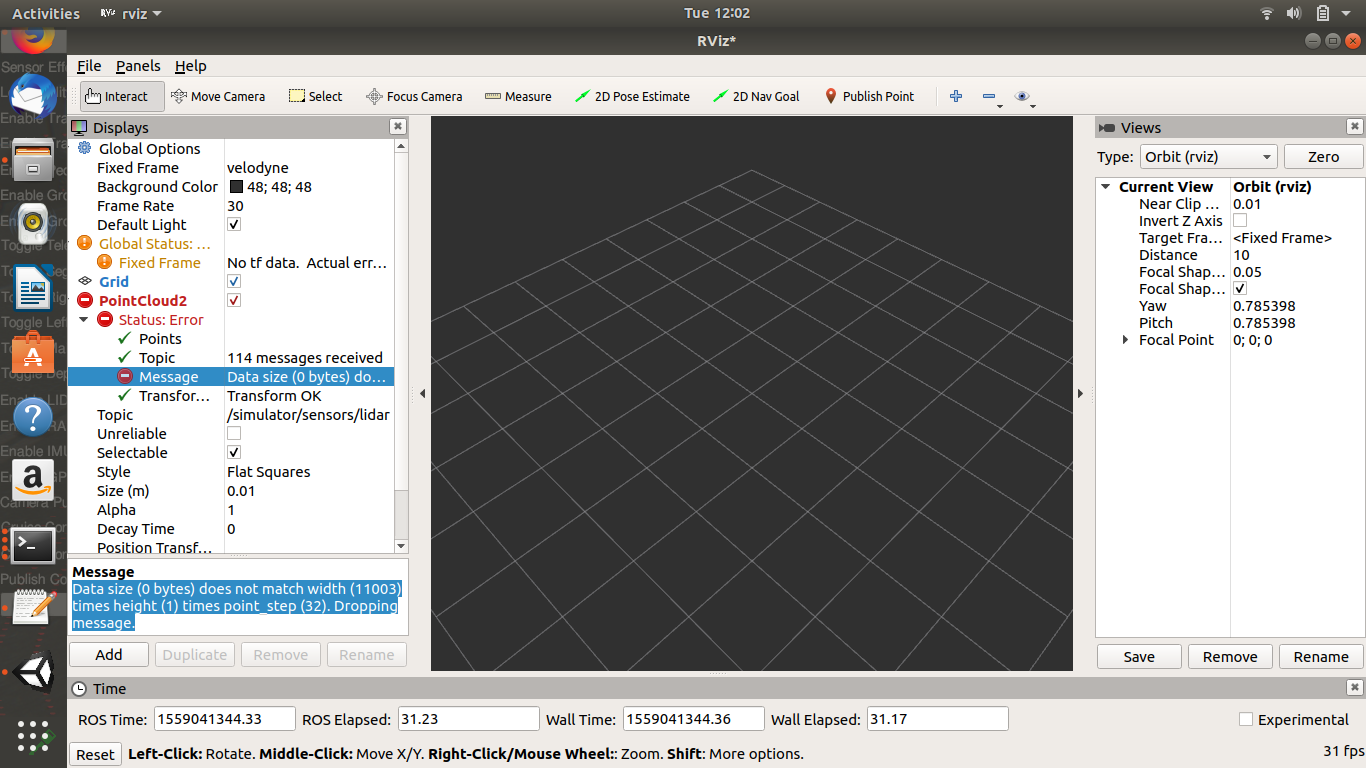
It seems that simulator is sending lidar data, but it has no points detected... Where is vehicle on the map positioned?
 ErijBNT
ErijBNT

when I run rostopic echo of the lidar topic I don't get the data. Why is that? The lidar sensor is enabled in the simulator.