 grassjelly
commented
2 years ago
grassjelly
commented
2 years ago Hey Phil,
You're only launching the URDF's publisher from the robot computer. You'll also need to run the visualizer from the host computer https://github.com/linorobot/linorobot2#22-visualize-the-robot-from-the-host-machine . I updated the README for clearer instructions.
 philmurp
philmurp
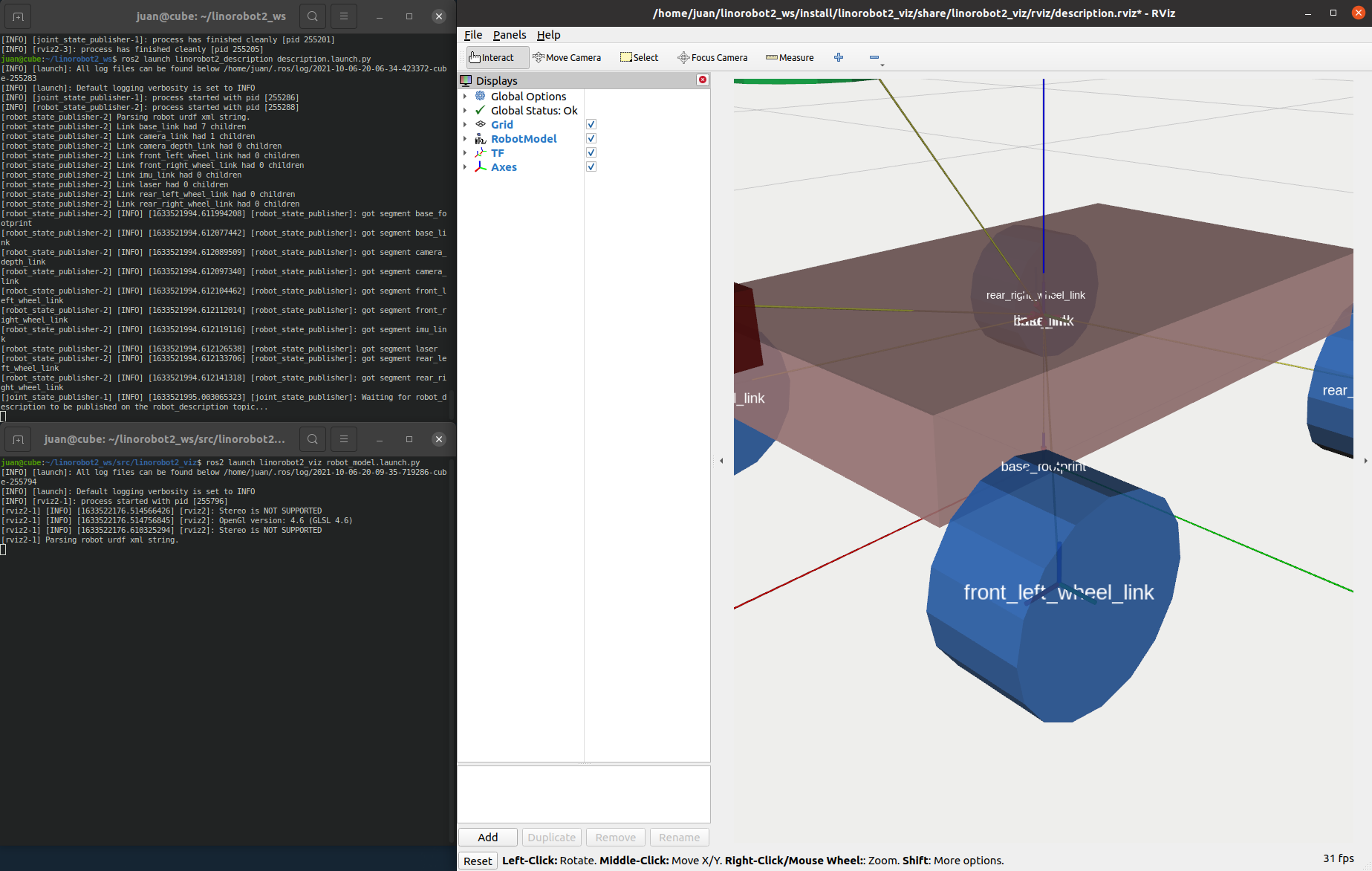
I am getting stuck at the "Visualize the newly created URDF" portion. I am able to edit my description file and colcon build, but then when I launch via robot computer I get stuck at attached screen.
Further steps like launching robot and conctrolling via keyboard works, but URDF and SLAM all get stuck waiting for this robot_description topic.
"joint_state_publisher: Waiting for robot_description to be published on the robot_description topic"
Any ideas on a resolution, been looking up for a while and reinstalled joint state publisher with no luck. My RVIZ on host computer comes up but is empty and I see the robot_description as an unvisualizable topic.
Thanks