 grassjelly
commented
2 years ago
grassjelly
commented
2 years ago Have you initialized the robot’s pose in rviz?
Closed EnderDragonEP closed 2 years ago
grassjelly
commented
2 years ago Have you initialized the robot’s pose in rviz?
 EnderDragonEP
commented
2 years ago
EnderDragonEP
commented
2 years ago Have you initialized the robot’s pose in rviz?
Thanks for the advice! I'll try. But SLAM need the position of the robot? That's kinda different from Linorobot revision one isn't it?
grassjelly
commented
2 years ago Sorry, I missed the slam part. Are you able to confirm that these topics https://github.com/linorobot/linorobot2_hardware#3-check-the-topics are available and publishing topics?
EnderDragonEP
commented
2 years ago Sorry, I missed the slam part. Are you able to confirm that these topics https://github.com/linorobot/linorobot2_hardware#3-check-the-topics are available and publishing topics?
Yes they are available odometry and IMU data are present.

/odom/unfiltered

/imu/data

grassjelly
commented
2 years ago Silly question, how about the /scan topic?
EnderDragonEP
commented
2 years ago Silly question, how about the
/scantopic?
Thank you for the head-up! I have found the cause of the problem.
I was thinking about where is the laser scan lines goes and I was checking the manual installation.
I installed the Rplidar and Realsense drivers and add the environment variables to the .bashrc.
Out of curiosity, I opened the .bashrc and I find that the LINOROBOT2_DEPTH_SENSOR and LINOROBOT2_LASER_SENSOR variables are not set.
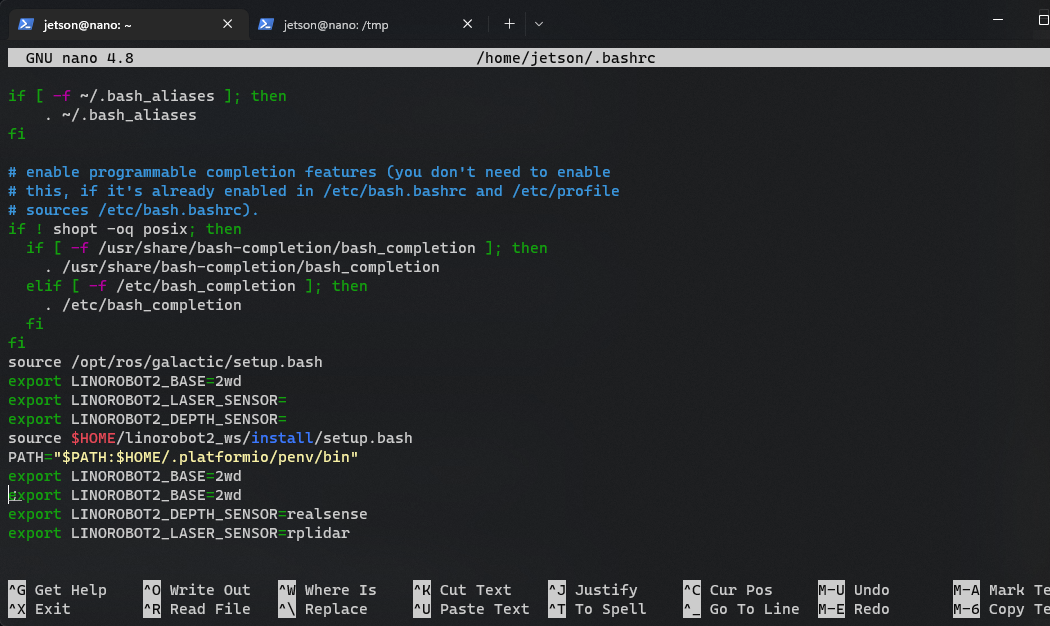
After I eddit the .bashrc and run the command source ~/.bashrc. The issue was fixed! No more errors.
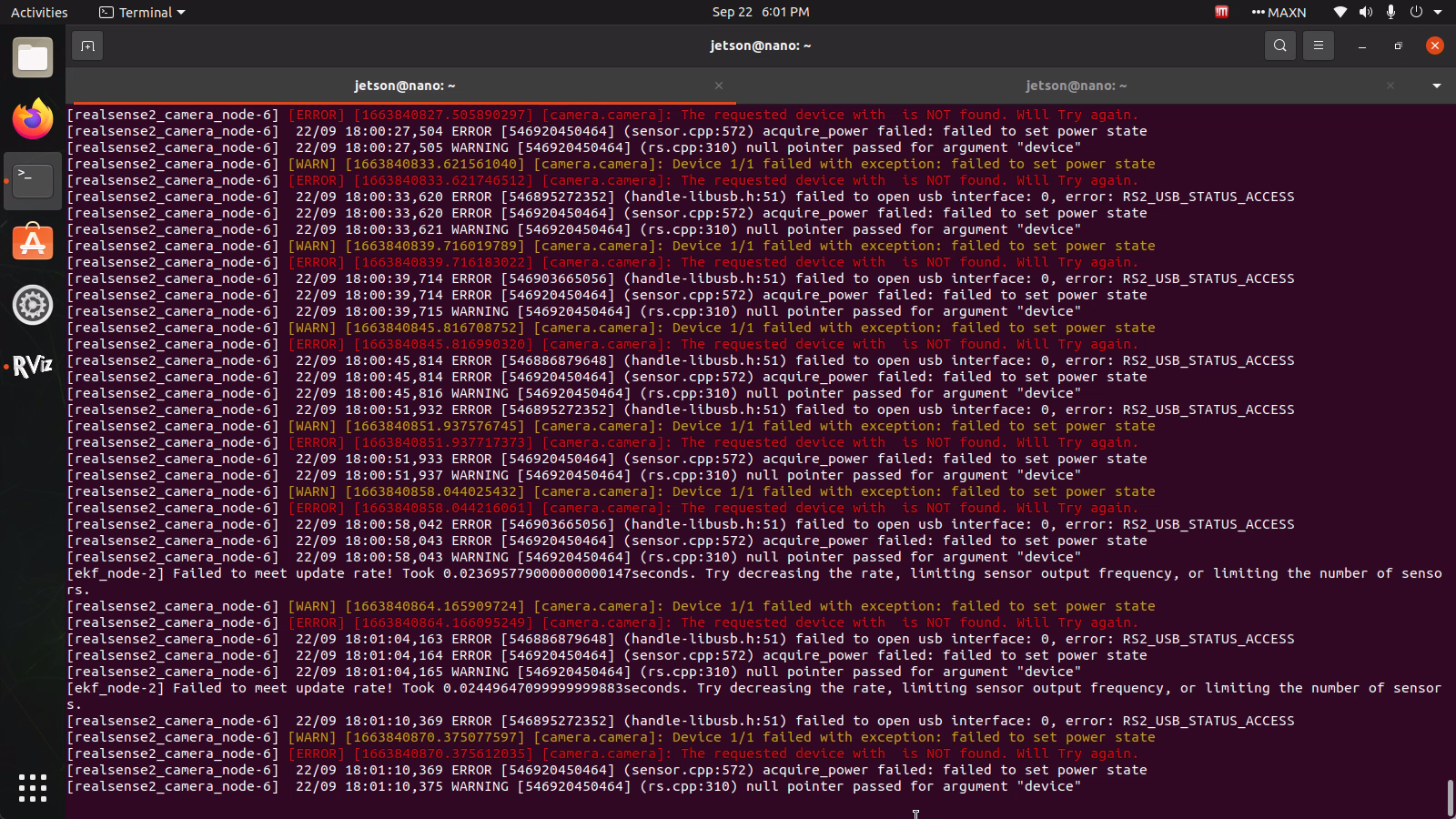
But seems like the Intel Realsense camera still have some issue. But that's the problem for another day. 😭
Thank for you help and guidance!
I run:


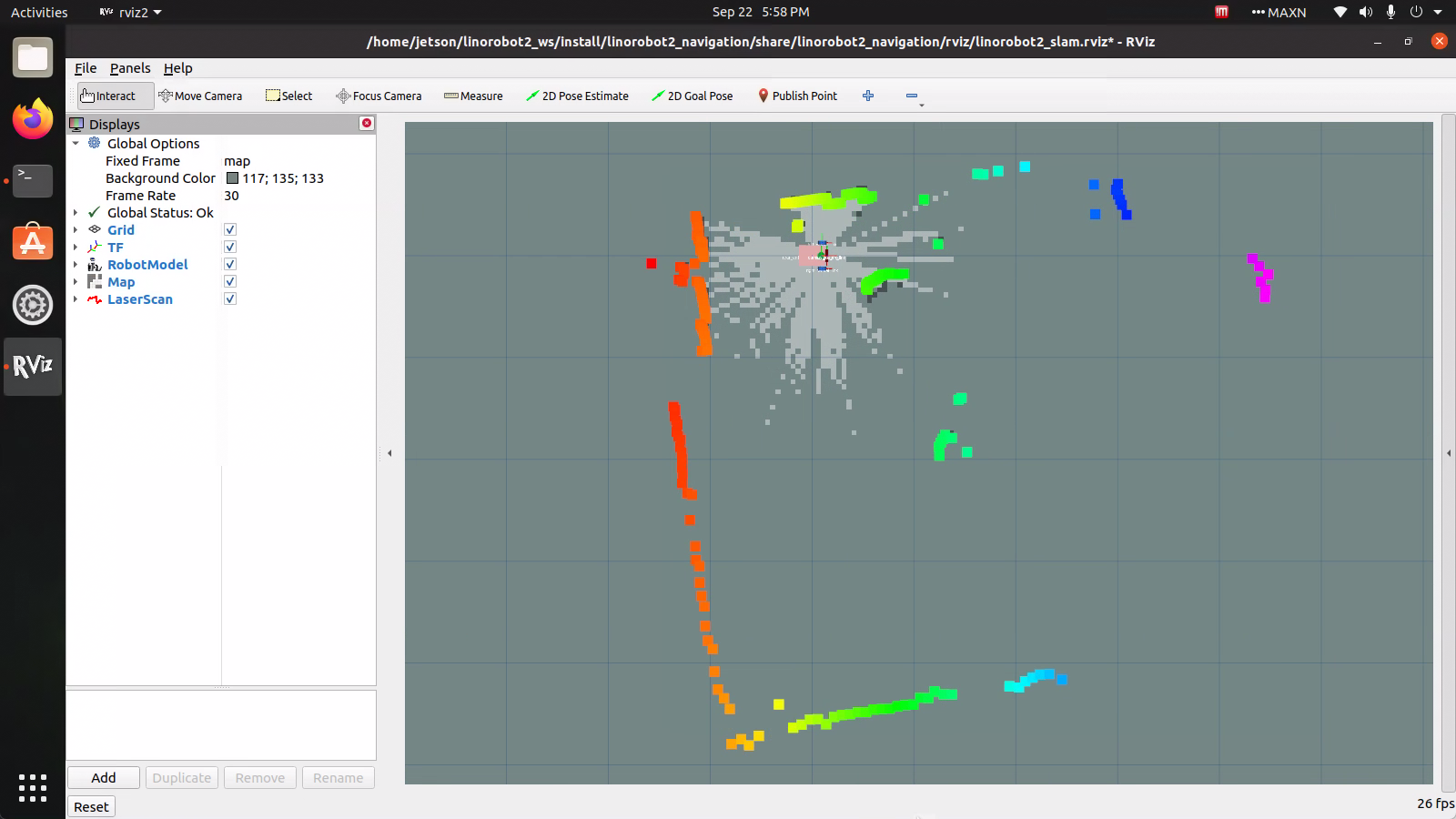
ros2 launch linorobot2_bringup bringup.launch.pyros2 run teleop_twist_keyboard teleop_twist_keyboardros2 launch linorobot2_navigation slam.launch.py rviz:=trueto slam, but I the transform wasn't working. And rviz has a lot of errors displayed all related to transform.I'm new to ROS2 and wasn't able to Identify and fix the problems...
URDF looks ok and working:
Topic list: