 lululxvi
commented
4 years ago
lululxvi
commented
4 years ago Here are some suggestions:
- Don't use relu, which is not second order differentiable. Use smooth activations, e.g., tanh.
- Try a small domain first.
- Don't use dropout.
- Some BCs can be imposed exactly, see "Q: By default, initial/boundary conditions are enforced in DeepXDE as soft constraints. How can I enforce them as hard constraints?" at FAQ.
 inunarun
inunarun jethromoses
jethromoses sumantkrsoni
sumantkrsoni ghost
ghost hchoiz
hchoiz SimonZeng7108
SimonZeng7108
Thanks for the great package.
I am attempting to validate / learn the framework on a simple incompressible steady state fluid mechanics problem, but seem to be having trouble with the convergence. The problem I am attempting to solve is (taken from Elmer tutorials (Tutorial 9)):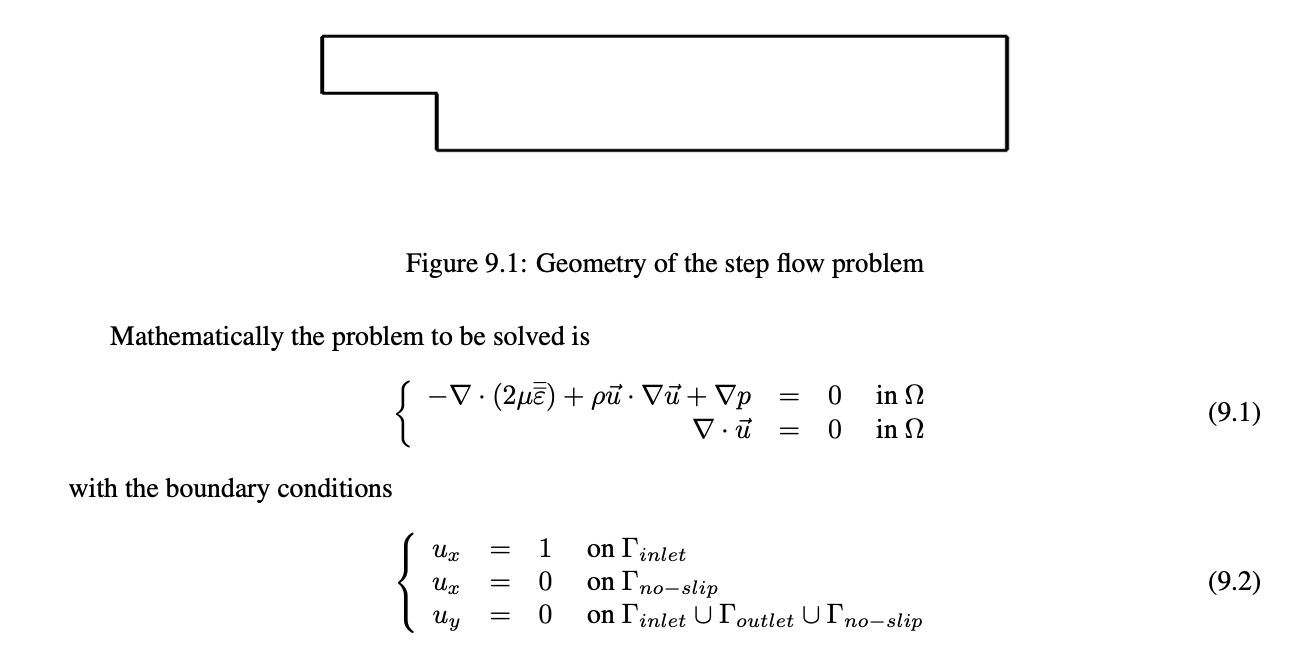
The true velocity profile from CFD is as follows: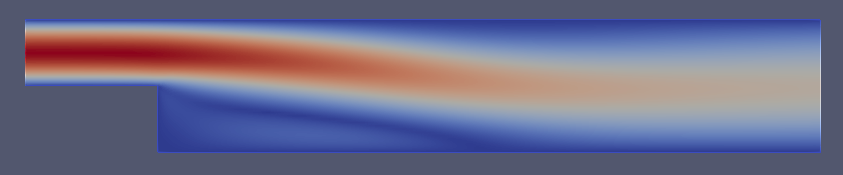
The one I get from the neural network is: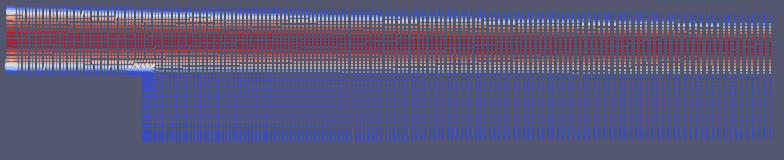
Analyzing the residuals, I see that the continuity and x-momentum residuals are at best ~1e-1 regardless of the number of epochs, network size, network architecture, etc. Would you have any recommendation on how to improve the convergence behavior?
Thanks.
My script is as follows for your reference: