 lyh458
commented
3 years ago
lyh458
commented
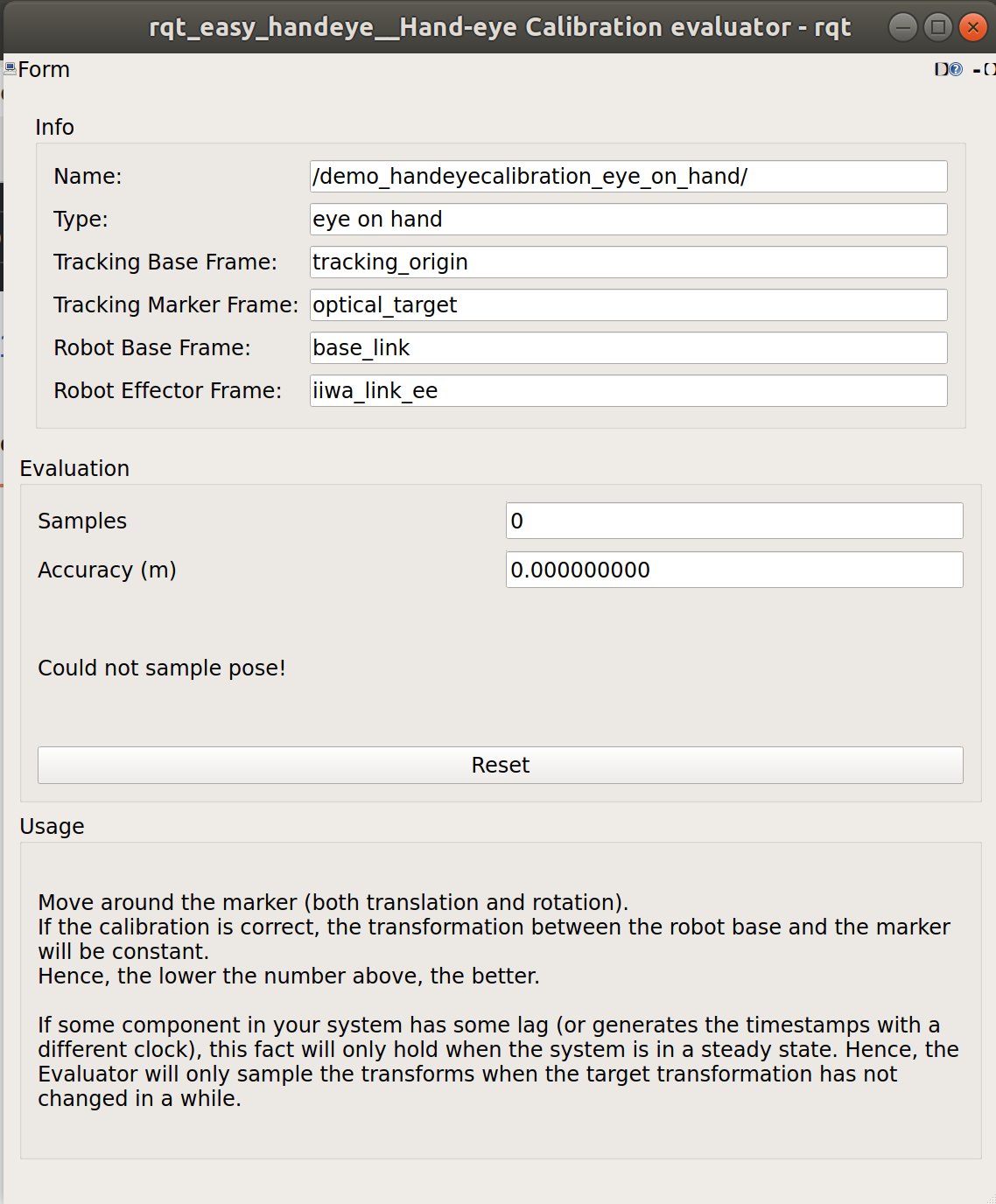
3 years ago And the two showed windows after run the command:

Closed lyh458 closed 3 years ago
lyh458
commented
3 years ago And the two showed windows after run the command:
 marcoesposito1988
commented
3 years ago
marcoesposito1988
commented
3 years ago Thanks for reporting, this bug was introduced in 0.4.0. I released a new version of easy_handeye (0.4.1) that fixes this issue. You will have to pull from that repository and calibrate again.
Sorry about that!
lyh458
commented
3 years ago Thanks for reporting, this bug was introduced in 0.4.0. I released a new version of easy_handeye (0.4.1) that fixes this issue. You will have to pull from that repository and calibrate again.
Sorry about that!
Thanks! It works after merging the update.
Hi, although with issue #6 , I calibrated successfully. But when I run the command
roslaunch easy_handeye_demo check_calibration.launch eye_on_hand:=trueto check the calibration, several warnings and errors occurred, here is the log:They mainly are:
error 1
warning 1
which can be solved by changing relative function as
return HandeyeCalibration.from_dict(yaml.load(in_yaml, Loader=yaml.FullLoader)), see PyYAML yaml.load(input) Deprecation, I will create a pull request to easy_handeye later.error 2
1 "module %r is not imported" % module_name.encode('utf-8'), mark) yaml.constructor.ConstructorError: while constructing a Python object module 'numpy' is not importederror 3
error 4
Thanks.