 vooon
commented
6 years ago
vooon
commented
6 years ago You need to add filter node that will reduce number of points. I think that node should be already written, just need to google. And that is not specific to mavros, it is more generic ros comms.
 rmackay9
rmackay9 TSC21
TSC21 razekmaiden
razekmaiden
 bj-neilson
bj-neilson Ebaker310
Ebaker310
I'm attempting to use the obstacle_distance plugin to send distances from a 360degree RPLidar range finder to ArduPilot. The OBSTACLE_DISTANCE mavlink messages are being sent to AP but only include the first 72 degrees of data from the range finder.
The messages from RPLidar are appear in /scan as LaserScan messages and below is a screen shot of the output of, "rostopic echo /scan".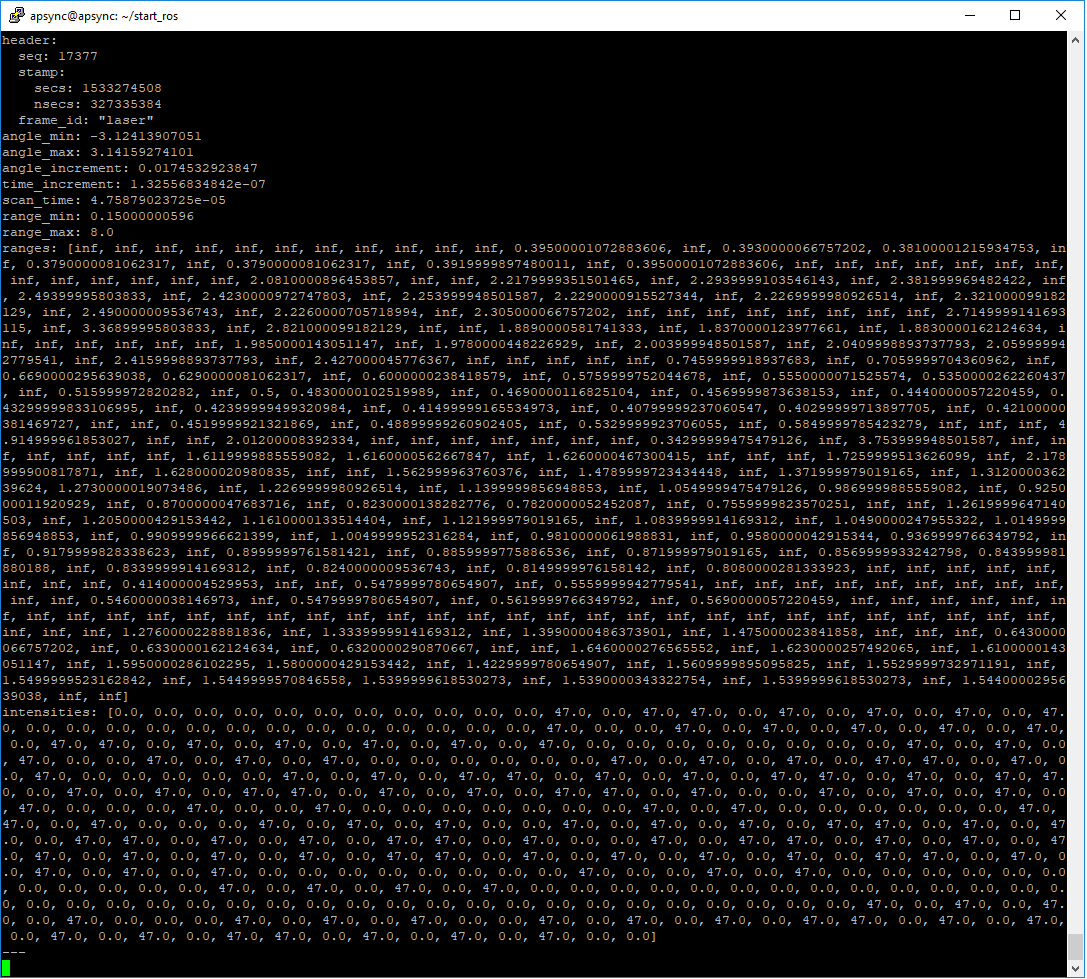
I've enabled the obstacle_distance plugin by adding "obstacle_distance" to the apm_pluginlist.yaml file and then in the node.launch file, I've added a remap like this, "\
The problem is though that the LaserScan message's have 1degree increments and the OBSTACLE_DISTANCE message's distance array only has 72 slots. Ideally I would like to combine the LaserScan data down into 45degree buckets and then send to AP via the OBSTACLE_DISTANCE message. I know 45 degree buckets is coarse but it should be sufficient for the obstacle avoidance we want to use this data for.