 paaraujo
commented
2 years ago
paaraujo
commented
2 years ago @milkcoffee365, it seems suspicious indeed because we know that

Thus, I would expect a subtraction instead of an addition. Line 219 seems fine due to the transformations that happen in previous lines.
 scott81321
scott81321 robocar2018
robocar2018 vkorotkine
vkorotkine
 we can compute the Jacobian with respect to the extrinsic matrix R_c_n based on some formula.
we can compute the Jacobian with respect to the extrinsic matrix R_c_n based on some formula.
In utils_numpy_filter.py. The body velocity computation seems wrong?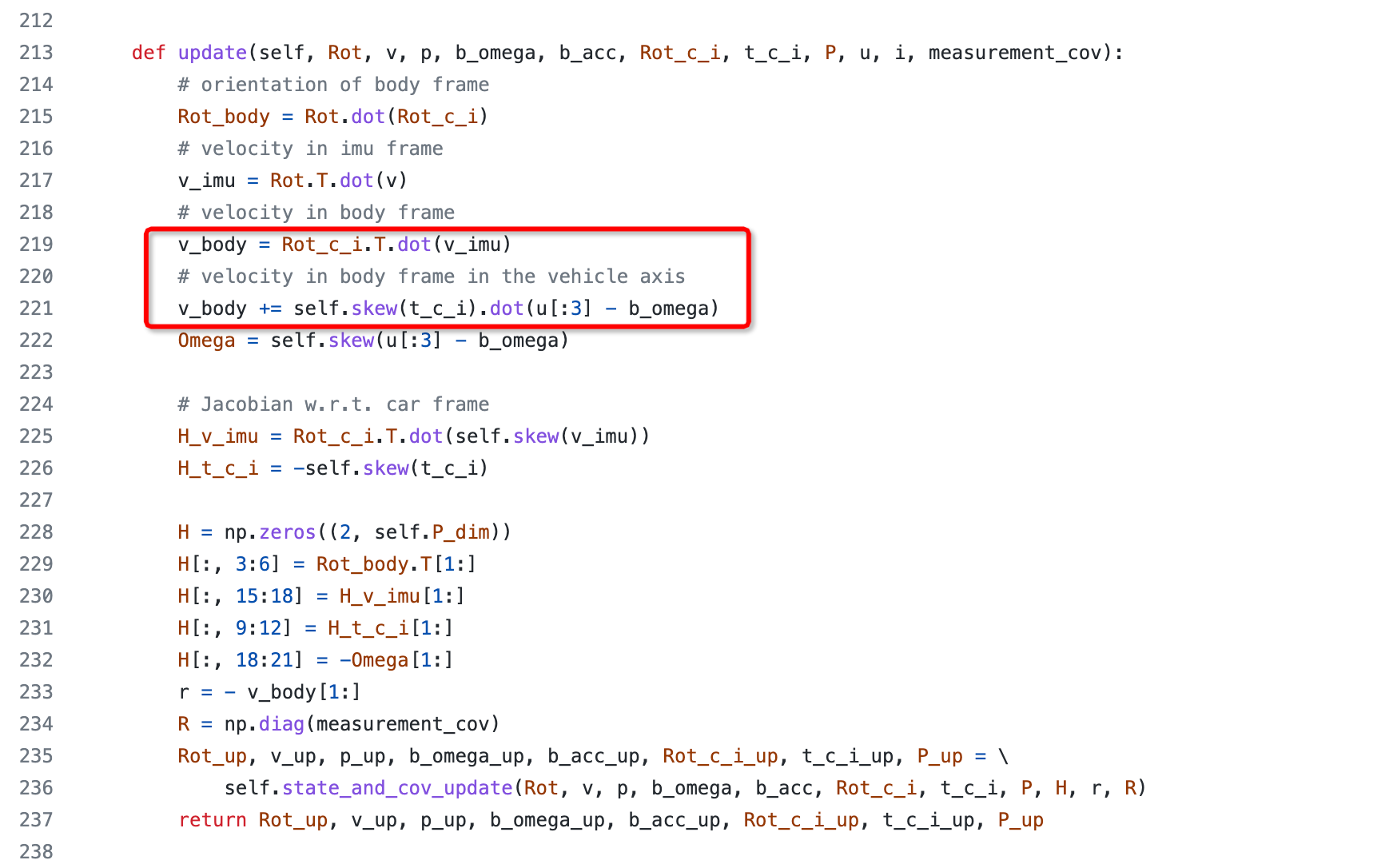 the formula in paper is
the formula in paper is
