 peterhinch
commented
3 years ago
peterhinch
commented
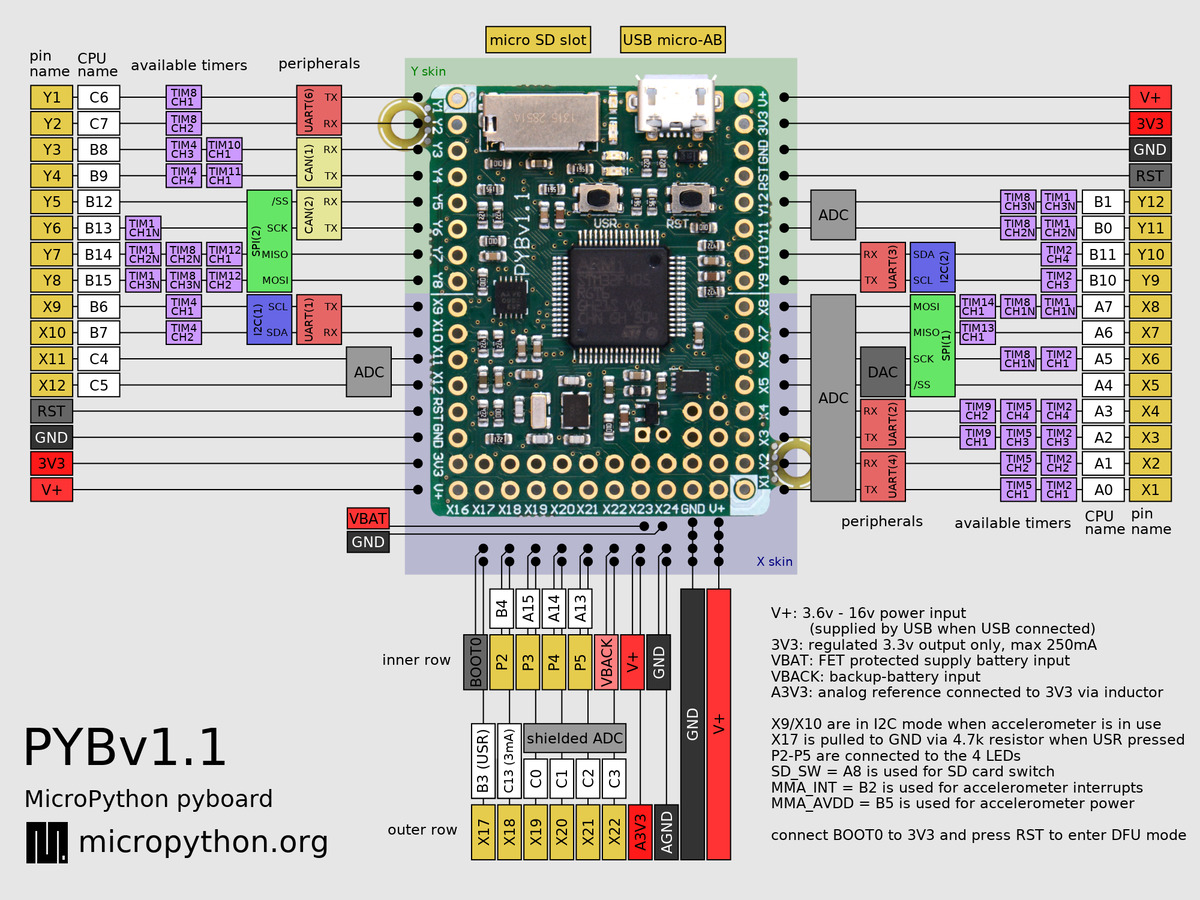
3 years ago The 'Y' side I2C connection is on Y9 and Y10. See the docs.
Closed Irvingao closed 3 years ago
peterhinch
commented
3 years ago The 'Y' side I2C connection is on Y9 and Y10. See the docs.
 Irvingao
commented
3 years ago
Irvingao
commented
3 years ago but i still met the same problem that" I2C failure when communicating with IMU". how can i do next?
Irvingao
commented
3 years ago and when it inits, i have to wait for over 30 seconds, it that too slow ?
Irvingao
commented
3 years ago and when it inits, i have to wait for over 30 seconds, it that too slow?
peterhinch
commented
3 years ago I can't explain that behaviour. Initialisation is normally immediate. I wonder if you have a genuine InvenSense chip or a Chinese clone?
peterhinch
commented
3 years ago Closing this. I assume it's resolved.
{kind=link}
imu = MPU6050('Y') print(imu.accel.xyz) print(imu.gyro.xyz) print(imu.temperature) print(imu.accel.z)` i connnected "X9" and "X10" for "SCL" and ""SDA". but always :MPUException: I2C failure when communicating with IMU. Thank you for help!