 AlexanderZ3
commented
3 years ago
AlexanderZ3
commented
3 years ago Btw, I want to add two basic questions:
- do I need to use my locally built Airsim Plugins file to replace the original plugins file in the pre-built binaries file?
- does the LinuxNoEditor mean that t can only operate on the Windows platform? cause I notice some environments have WindowsNoEditor (such as the AbandonedPark)?
Maybe these are just some beginning-level questions, hope you can give me some clues. Thanks for your help, sincerely!
 bedaberner
bedaberner ahmed-elsaharti
ahmed-elsaharti


 stale[bot]
stale[bot]
Question
What's your question?
Main Question: How to use the pre-compiled binaries AirSimNH for setting up the city environment for Win10?
Setting environments
Win 10, AirSim1.4 (Latest), UE2.5 and 2.4 (I installed both engines, 2.5 can run block successfully and 2.4 for landscape mountain. But neither can work for the AirSimNH. )Include context on what you are trying to achieve
I want to fly the multirotor in the urban neighborhood block environment, but when I unzip the downloaded AirSimNH files, it fails to be compiled. My operation procedures are shown in the below figures: 1. unzip: AirSimNH >> LinuxNoEditor >> AirSimNH >> AirSimNH.uproject  2. Double click the AirSimNH.uproject (The default is UE2.5, I also tried UE2.4, Still not work)  ### Include details of what you already did to find answers I have run the block environment in UE2.5 successfully, and the landscape mountain in UE2.4. But there are some strange points, shown in the below figures, I am not sure if they influence the main question. If not, could you give me some advice for these two problems? 1. some warnings when building every project: "Shell32.lib", "dinput8.lib" and "dxguid.lib" are not resolvable.  2. For my interaction page, I don't find the three views shown in the bottom position in the demo video. How to obtain these views? 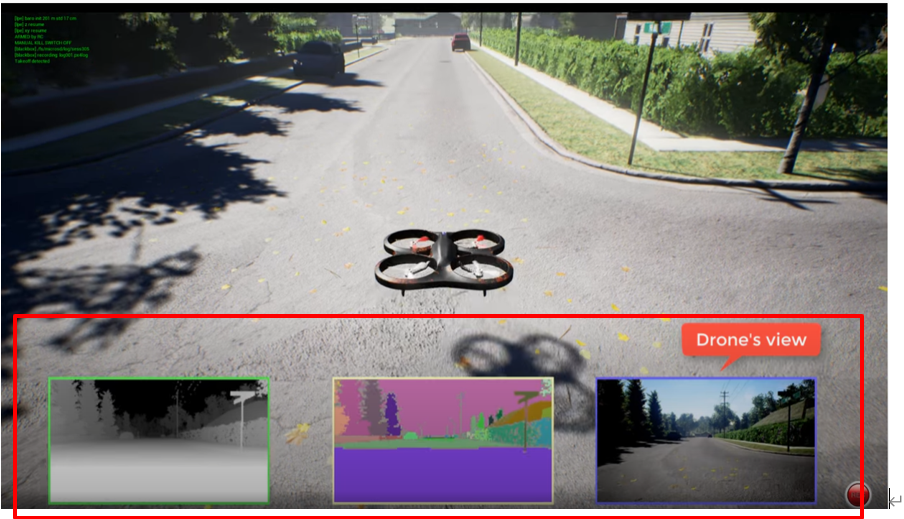 [My interaction page]  Thanks a lot!