 LMescheder
commented
5 years ago
LMescheder
commented
5 years ago I ended up writing my own cython code for checking if a point is inside a mesh, based on this answer stack overflow: https://stackoverflow.com/a/6576840 As far as I can tell, it works quite robustly and yields more accurate results. I would be happy to contribute the code (not now, but in a few weeks) if you are interested.
 mikedh
mikedh oliverstefanov
oliverstefanov benoitrosa
benoitrosa AtinAngrish
AtinAngrish avlonder
avlonder AymericFerreira
AymericFerreira aluo-x
aluo-x sinAshish
sinAshish
I experiencing some issues with the
Trimesh.containsmethod. I tried to debug it myself, but I couldn't find any issues in the trimesh code. I suspect it's inaccuracies in PyEmbree.Here is the code I'm using:
The result looks like this: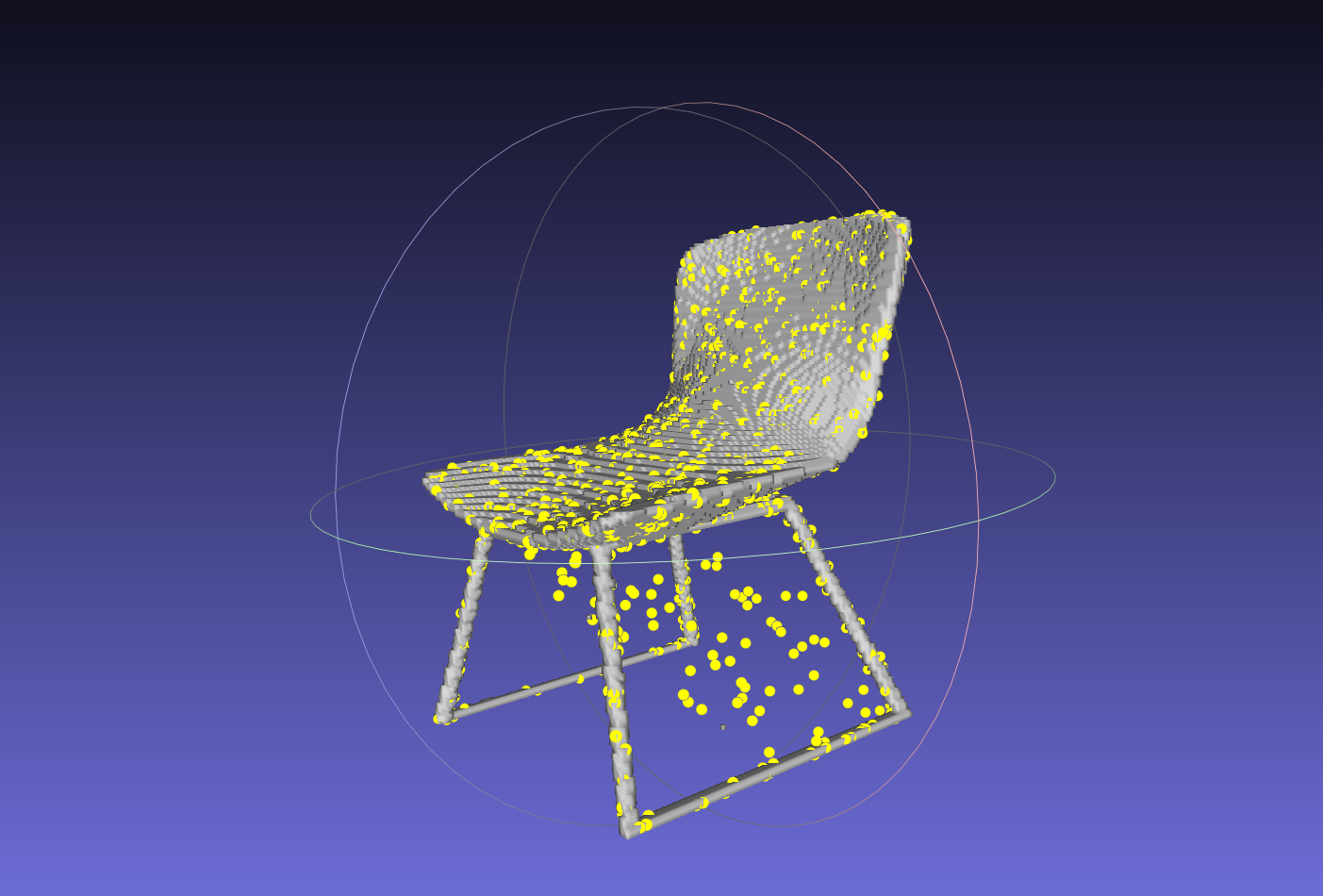
Here are the input / output files: https://www.dropbox.com/sh/6i0222tk9lpkqgr/AAC1mZ0yblFsXxg9cEMmfneJa?dl=0
Of course, in this special case I can do it in a simpler way by exploiting the regular grid structure of the mesh. However, I also experience similar problems for other meshes (usually at higher resolutions).
I would appreciate any help!