 mks0601
commented
4 years ago
mks0601
commented
4 years ago Hi, no I haven't seen this kind of problem. How did you visualize the 2D pose?
Closed hansongfang closed 4 years ago
mks0601
commented
4 years ago Hi, no I haven't seen this kind of problem. How did you visualize the 2D pose?
 hansongfang
commented
4 years ago
hansongfang
commented
4 years ago Thank you for the quick reply. Attached, please find the code for visualization. I have checked it several times. With the same code, most actions look normal. It really bothers me. It would be really appreciated if you can help try running the attached code. I download the human dataset with the google drive link provided in the readme.md.
-------------------------------------------------Code------------------------------------------------------
import os
import os.path as osp
import numpy as np
import json
import cv2
import shutil
def world2cam(world_coord, R, T):
cam_coord = np.dot(R, world_coord - T)
return cam_coord
def cam2pixel(cam_coord, f, c):
x = cam_coord[:, 0] / (cam_coord[:, 2] + 1e-8) * f[0] + c[0]
y = cam_coord[:, 1] / (cam_coord[:, 2] + 1e-8) * f[1] + c[1]
z = cam_coord[:, 2]
img_coord = np.concatenate((x[:,None], y[:,None], z[:,None]),1)
return img_coord
def vis_frame(joints, parents, joints_right, img, colors=None,
use_score=False, joint_scores=None, threshold=None):
"""Draw joints in original image
Args:
joints: joint position, np.array, (n, 2)
parents: joint parent id, np.array, (n, )
joints_right: right joint ids, np.array, (m, )
img: original image, np.array, (height, width, 3)
threshold: threshold for drawing joints
colors: color is used to draw joints and bones, list, [(255, 0, 0), ...]
joint_scores: confidence of estimated joint, np.array, (n, 3)
use_score: if True, alpha = score
Returns:
vis_img: drawing result, np.array, (height, width, 4)
"""
if use_score is True:
assert joint_scores is not None
assert threshold is not None
if threshold is None:
threshold = 0.0
if joint_scores is None:
num_joints = joints.shape[0]
joint_scores = np.ones(num_joints)
if colors is None:
colors = [(255, 0, 0) if j in joints_right else (0, 0, 255) for j in range(joints.shape[0])]
for j in range(joints.shape[0]):
if joint_scores[j] < threshold:
continue
x, y = int(joints[j, 0]), int(joints[j, 1])
cv2.circle(img, (x, y), 6, colors[j], -1)
j_parent = parents[j]
if j_parent < 0 or joint_scores[j_parent] < threshold:
continue
x2, y2 = int(joints[j_parent, 0]), int(joints[j_parent, 1])
cv2.line(img, (x, y), (x2, y2), colors[j], thickness=3) # Control thickness with score
return img
def render_2d(input_img_dir, seq_2d, joint_parent, joint_right, img_dir):
if osp.exists(img_dir):
shutil.rmtree(img_dir)
base_name = osp.basename(input_img_dir)
print(f'Render 2d pose to {img_dir}.')
print(f'Human 36m inputs dir {base_name}')
os.makedirs(img_dir, exist_ok=True)
for frame_id in range(seq_2d.shape[0]):
pose_2d = seq_2d[frame_id]
img_file = osp.join(img_dir, f'frame_{frame_id}.jpg')
# img = np.ones((height, width, 3), dtype=np.uint8) * 255
input_img_file = f'{input_img_dir}/{base_name}_{(frame_id+1):06}.jpg' # human36m start from 1
assert osp.exists(input_img_file)
img = cv2.imread(input_img_file)
vis_img = vis_frame(pose_2d, joint_parent, joint_right, img)
cv2.imwrite(img_file, vis_img)
if __name__ == "__main__":
base_dir = '/media/shanaf/HDD/DATA/Human36m'
h36m_img_dir = osp.join(base_dir, 'Human36m', 'images')
annot_path = osp.join(base_dir, 'Human36m', 'annotations')
subject_id = 9
act_id = 10
sub_act_id = 2
h36m_cam_id = 3
joints_file = osp.join(annot_path, 'Human36M_subject' + str(subject_id) + '_joint_3d.json')
assert osp.exists(joints_file)
with open(joints_file, 'r') as f:
joints = json.load(f)
camera_info_file = osp.join(annot_path, 'Human36M_subject' + str(subject_id) + '_camera.json')
with open(camera_info_file, 'r') as f:
cameras = json.load(f)
cam_param = cameras[str(h36m_cam_id)]
R = np.array(cam_param['R'], dtype=np.float32)
t = np.array(cam_param['t'], dtype=np.float32)
f = np.array(cam_param['f'], dtype=np.float32)
c = np.array(cam_param['c'], dtype=np.float32)
joints_act = joints[str(act_id)][str(sub_act_id)]
duration = len(joints_act.keys())
seq_pose = []
seq_pose_2d = []
for frame_id in range(duration):
pose_3d_frame = np.array(joints_act[str(frame_id)], dtype=np.float32)
seq_pose.append(pose_3d_frame)
# 2d pose
pose_3d_frame_cam = world2cam(pose_3d_frame.transpose(1, 0),
R, t.reshape(3, 1)).transpose(1, 0)
pose_2d_img = cam2pixel(pose_3d_frame_cam, f, c)
pose_2d_img = pose_2d_img[:, :2]
seq_pose_2d.append(pose_2d_img)
seq_pose_2d = np.array(seq_pose_2d, dtype=np.float32)
joint_parent = [-1, 0, 1, 2, 0, 4, 5, 0, 7, 8, 9, 8, 11, 12, 8, 14, 15]
joint_right = [1, 2, 3, 14, 15, 16]
subject_dir = './S9'
os.makedirs(subject_dir, exist_ok=True)
input_img_dir = f'{h36m_img_dir}/' \
f's_{subject_id:02}' \
f'_act_{act_id:02}' \
f'_subact_{sub_act_id:02}' \
f'_ca_{h36m_cam_id:02}'
print(f'Human36m pose corresponding image dir {input_img_dir}.')
img_dir = osp.join(subject_dir, f'act_{act_id}_subact_{sub_act_id}')
video_file = osp.join(subject_dir, f's_{subject_id:02}_act_{act_id}_subact_{sub_act_id}_cam{h36m_cam_id}_2d.mp4')
gif_file = osp.join(subject_dir, f's_{subject_id:02}_act_{act_id}_subact_{sub_act_id}_cam{h36m_cam_id}_2d.gif')
render_2d(input_img_dir,
seq_pose_2d,
joint_parent,
joint_right,
img_dir)Oh I found the same problem. However, most of other frames are normal. I do nothing special when pre-processing the h36m data.. maybe I think this error comes from the original h36m dataset.
mks0601
commented
4 years ago As h36m dataset is very large scale, I think this error might not effect the test performance largely.
hansongfang
commented
4 years ago Thanks. I agree.
Hi, thank you for sharing the data. I observe a weird problem that the 2D pose was not matched to the person for some action. This is the visualization of subject9, action sittingDown, subact2.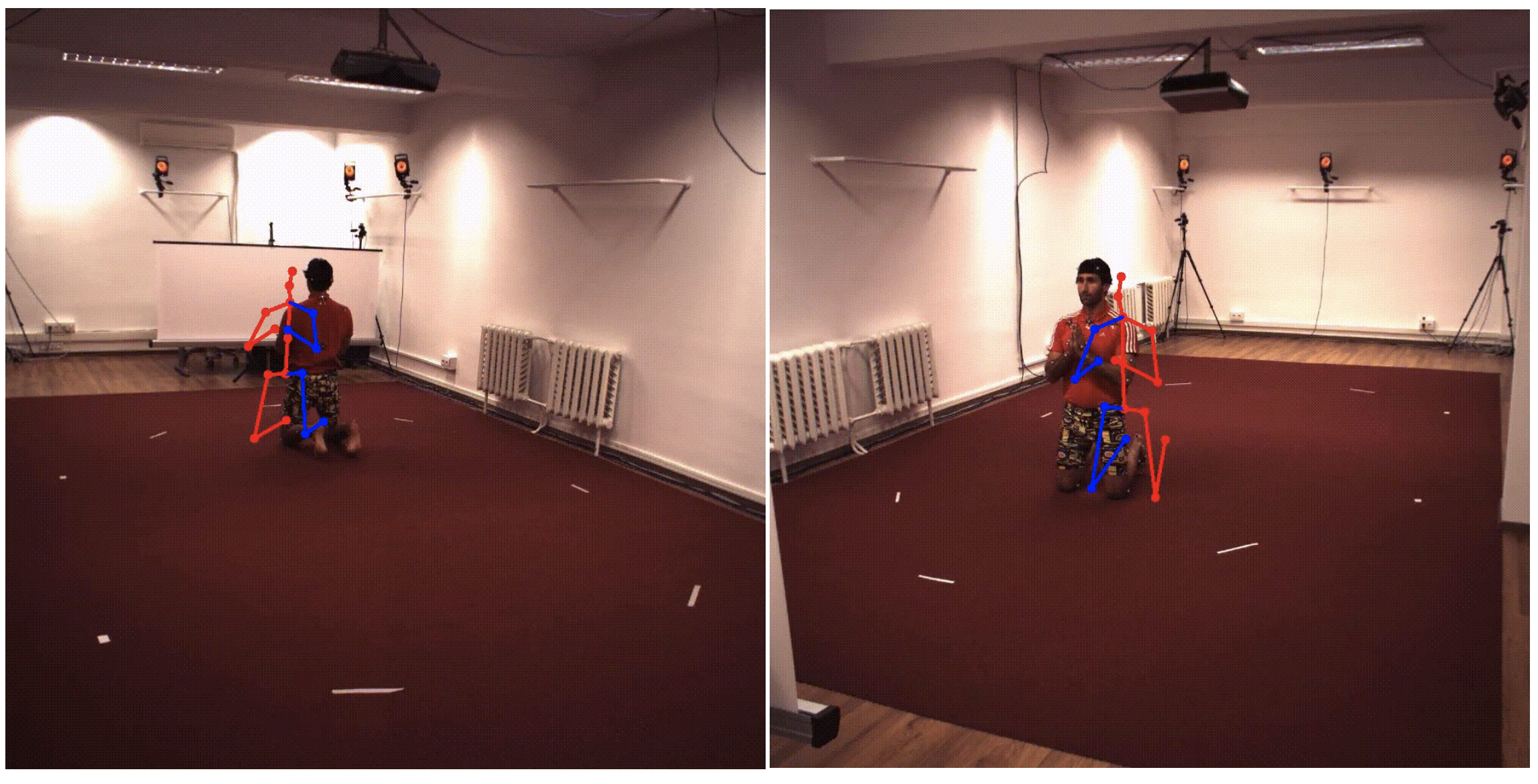
Do you observe the same issue? Is this a problem with the original Human36M Dataset?