 rhaschke
commented
5 years ago
rhaschke
commented
5 years ago I think the main issue here, is that spheres and cylinders are eventually approximated by triangle meshes. Hence, there is only a minimal chance to exactly hit a vertex point on the surface of a cylinder / sphere surface - which then will be considered inside. I'm afraid this won't fix.
 peci1
peci1 guihomework
guihomework simonschmeisser
simonschmeisser BryceStevenWilley
BryceStevenWilley
Sphere excludes surface points.
Cylinder includes top and bottom surfaces, but excludes the sides.
Box includes all surface points.
Mesh includes all surface points.
I think being consistent would be great. What's bad is that there is no documentation that would help determining what's the desired result.
I created a test suite in https://github.com/ros-planning/geometric_shapes/pull/90 . I defined a macro
which you can change to see what happens if you define that surface points should be included or excluded. So far, the test suite fails in both cases.
With
#define EXPECT_SURF EXPECT_FALSE:With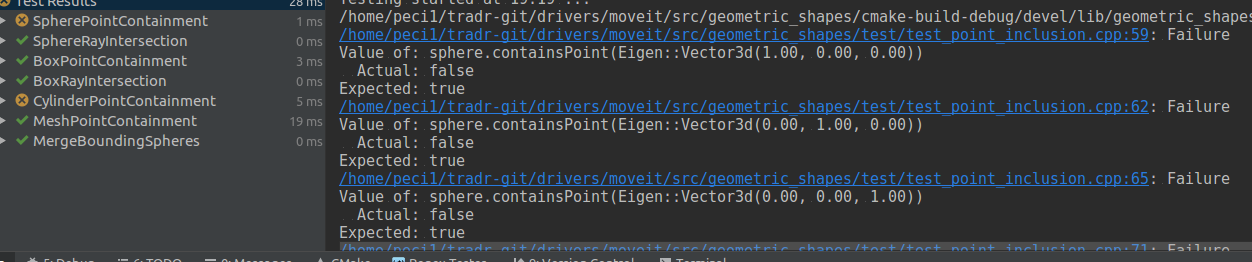
#define EXPECT_SURF EXPECT_TRUE:What to do next? Apparently, there are 3 options:
C++ API is UNREVIEWED and UNSTABLE, so it shouldn't matter).What are your opinions? When there's a consensus about this choice, I can implement the fix.