 niemsoen
commented
1 year ago
niemsoen
commented
1 year ago Hey Kelly,
have you had any more luck with this? When I call the distanceToCollision function on my Planning Scene which only has an Octomap as collision geometry, I always get the same double value of 179769313486231570814527423731704356798070567525844996598917476803157260780028538760589558632766878171540458953514382464234321326889464182768467546703537516986049910576551282076245490090389328944075868508455133942304583236903222948165808559332123348274797826204144723168738177180919299881250404026184124858368.000000
which I guess is the maximum value of a double variable (not sure about this).

Anyway, I thought I'd ask if you have any news, your reply is very much appreciated! Sönke
 Hunger-beat
Hunger-beat
Hello everyone,
I would like to find the closest points of a static octomap (added to the planning scene) wrt the robot links.
I could already solve this problem for simple geometric shapes (boxes, cylinders, spheres) in the planning scene, see https://github.com/ros-planning/moveit/issues/2998#issuecomment-1022261999.
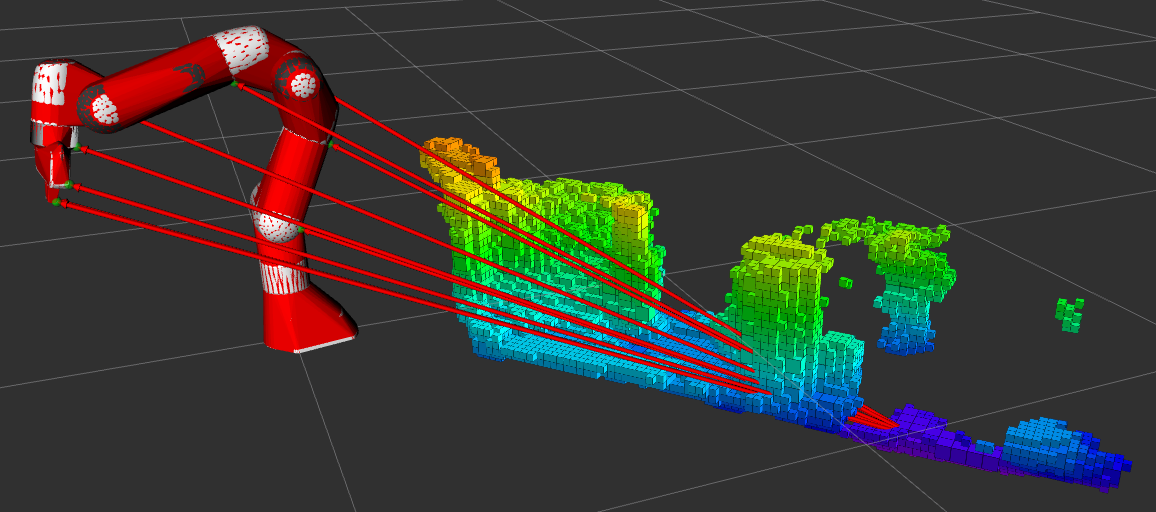
However, when I add an octomap to the planning scene, the nearest_points vector I receive via CollisionResult.contacts gives me always the same point of the octomap with the accompanying nearest point per robot link, see figure below. This point is clearly not the closest point of the Octomap to the robot links. Below you can see the same figure, but with the robot collision mesh (in red) enabled.
Below you can see the same figure, but with the robot collision mesh (in red) enabled.
 When changing the position of the same octomap, to clearly show that other octomap points are closer to the robot, again the same octomap point comes out of the CollisionResult.contacts contact map as before.
When changing the position of the same octomap, to clearly show that other octomap points are closer to the robot, again the same octomap point comes out of the CollisionResult.contacts contact map as before.
 Below you can see the same figure, but with the robot collision mesh (in red) enabled.
Below you can see the same figure, but with the robot collision mesh (in red) enabled.
Can anyone help me with this issue?
Thanks, Kelly