 v4hn
commented
3 years ago
v4hn
commented
3 years ago The transport pose is the configuration used to ship the robot in its original box.
That's the main reason why it was part of the configuration.
Yes, it's in collision with the current model and this was discussed somewhere before. The MoveIt-compatible trajectory controller can't move the robot to this pose because the internal self-collision check will fail as well. Apparently they have a separate internal routine to move to this pose.
 tylerjw
tylerjw


 JafarAbdi
JafarAbdi davetcoleman
davetcoleman rickstaa
rickstaa rhaschke
rhaschke simonschmeisser
simonschmeisser
Description
This was created by generating using the master branch of MoveIt. There are a handful of files that were not generated (i.e.
config/panda_arm_hand.srdf.xacro), I'd like to document how they are created and what their use is in the README.Lastly, I chose two new poses that are as close to the original ones as I could make and stay out of collision. I didn't include the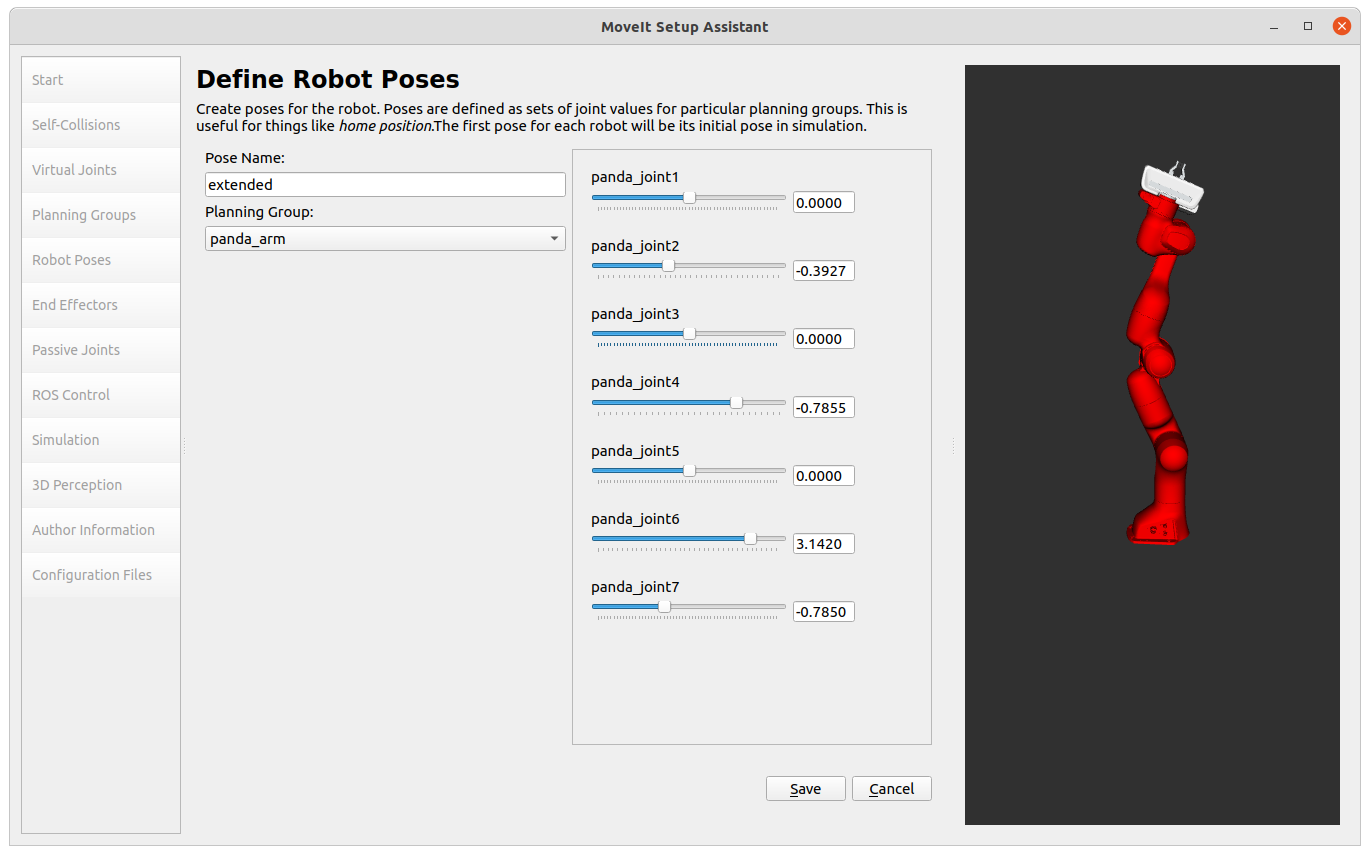
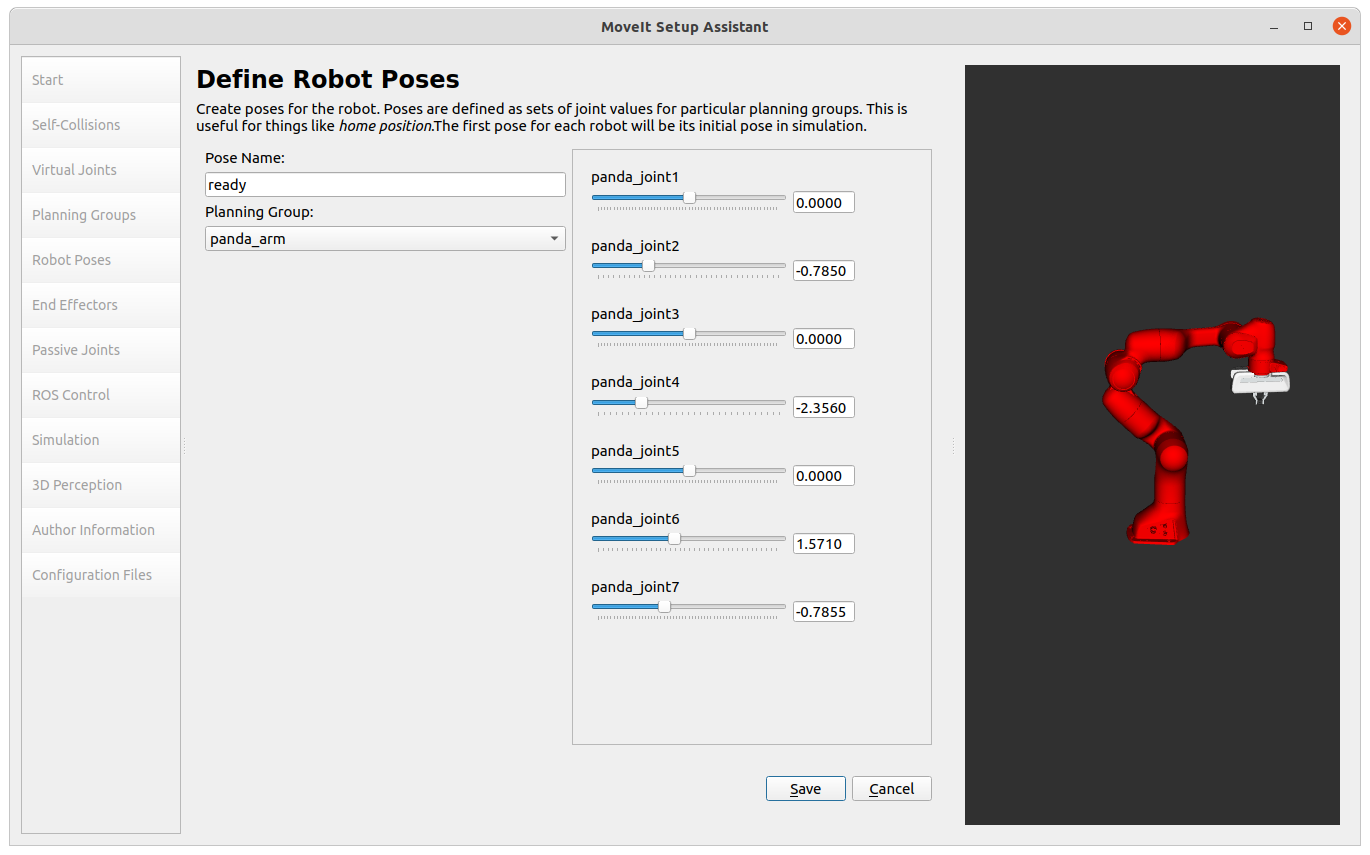
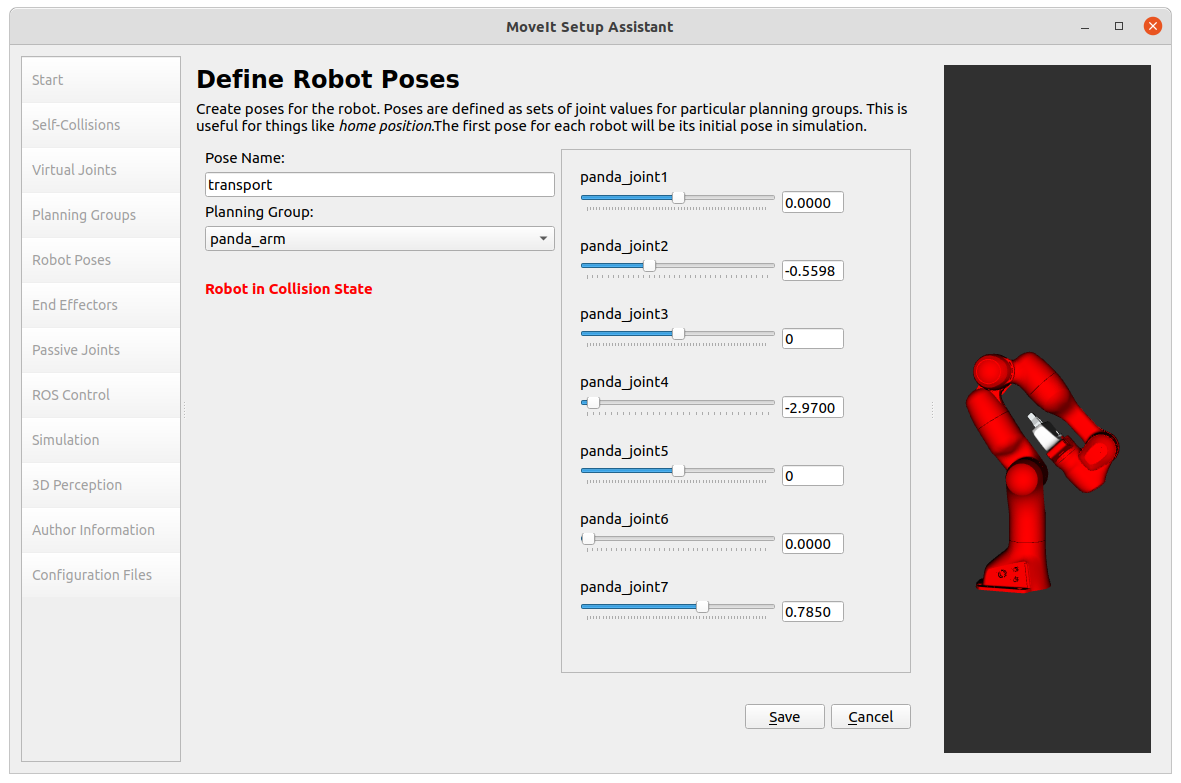
transportpose because I was not able to make that pose and stay out of collision. I've included images of each pose here:Lastly, this should be tested with moveit_tutorials to make sure it doesn't break any of those.
Notes to reviewers
Here are the things that need to be done before this is ready: