 msteinbeck
commented
2 years ago
msteinbeck
commented
2 years ago Hi @truewq,
Maybe tinyspline::BSpline::interpolateCatmullRom solves your issue. If alpha is 0.5 (the default value), the interpolated spline has no cusps (see https://splines.readthedocs.io/en/latest/euclidean/catmull-rom-properties.html#Cusps-and-Self-Intersections for more details). Could you please also visualize the interpolated control points.
 truewq
truewq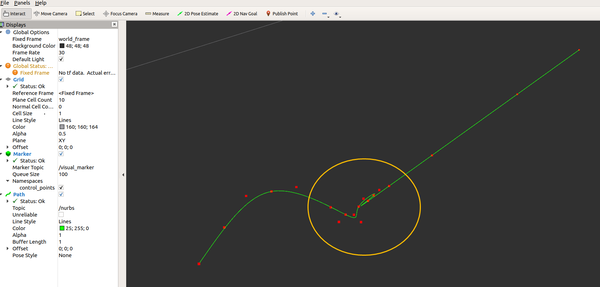{kind=link}
Hi I'm using tinyspline to interpolate for robot end effector way point. The following is my code:
include "ros/ros.h"
include "tinysplinecxx.h"
include <nav_msgs/Path.h>
int main(int argc, char **argv) { ros::init(argc, argv, "tiny_nurbs"); ros::NodeHandle n; ros::Publisher path_pub = n.advertise("nurbs",1, true);
// Setup control points. std::vector ctrlp ;
ctrlp.push_back(0.471);
ctrlp.push_back(0.168);
ctrlp.push_back(0);
ctrlp.push_back(0.432); ctrlp.push_back(0.152); ctrlp.push_back(0);
ctrlp.push_back(0.413); ctrlp.push_back(0.184); ctrlp.push_back(0);
ctrlp.push_back(0.406); ctrlp.push_back(0.184); ctrlp.push_back(0);
ctrlp.push_back(0.397); ctrlp.push_back(0.183); ctrlp.push_back(0);
ctrlp.push_back(0.388); ctrlp.push_back(0.183); ctrlp.push_back(0);
ctrlp.push_back(0.208); ctrlp.push_back(0.168); ctrlp.push_back(0);
tinyspline::BSpline spline = tinyspline::BSpline::interpolateCubicNatural(ctrlp, 3);
// Evaluate result = spline.eval(0.4).result();
std::cout << "x = " << result[0] << ", y = " << result[1]<<", z = " << result[2] << std::endl;
splineat u = 0.4 using 'eval'. std::vectorfloat f = 0.0; ros::Rate loop_rate(0.2); while (ros::ok()) { nav_msgs::Path path;
}
return 0; }
I got a strange burr in the penultimate curve. Please click the link of the picture shows the burr. https://pic2.zhimg.com/v2-812d990236890202e0815db0f3a4c2e9_b.png
Could you please tell me why I got this burr? If I change the distance between the last and the penultimate data point, then the burr would become smoother or even disappear. How can I solve this problem?
Thanks.