mzahana
commented
3 years ago
mzahana
commented
3 years ago Would be nice to see the interface with AirSim
Closed Yueting-Li closed 3 years ago
mzahana
commented
3 years ago Would be nice to see the interface with AirSim
 Kevinlibaba
commented
3 years ago
Kevinlibaba
commented
3 years ago @Yueting-Li This error may be caused by the wrong frame of pointcloud. The frame of /points/colored is /front_center_optical_frame which should be transformed to /world.
 Yueting-Li
commented
3 years ago
Yueting-Li
commented
3 years ago @Kevinlibaba
Thanks for your reply. I just use depth_image_proc (http://wiki.ros.org/depth_image_proc) to generate point cloud and don't consider the frame of it. But I dont know how to transform it. Can you give me some advice?
Hope for your reply.
Kevinlibaba
commented
3 years ago @Yueting-Li You just need to listen the /tf between two frames to generate a transform matrix, and make the transforming via pcl::transformPointCloud. Follows is a sample:
#include <ros/ros.h>
#include <pcl_ros/point_cloud.h>
#include <geometry_msgs/Pose.h>
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include <tf/transform_broadcaster.h>
#include <tf/message_filter.h>
#include <tf/transform_listener.h>
#include <pcl_ros/transforms.h>
#include <pcl/common/transforms.h>
#include <pcl/conversions.h>
#include <pcl_ros/impl/transforms.hpp>
class SegMapROSWraper
{
private:
ros::NodeHandle m_nh;
ros::Publisher m_globalcloudPub;
message_filters::Subscriber<sensor_msgs::PointCloud2> *m_pointCloudSub;
tf::MessageFilter<sensor_msgs::PointCloud2> *m_tfPointCloudSub;
tf::TransformListener m_tfListener;
public:
SegMapROSWraper()
: m_nh("~")
{
m_pointCloudSub = new message_filters::Subscriber<sensor_msgs::PointCloud2>(m_nh,"/seg_kitti_velo/pointcloud", 100);
m_tfPointCloudSub = new tf::MessageFilter<sensor_msgs::PointCloud2>(*m_pointCloudSub, m_tfListener, "/world", 100);
m_tfPointCloudSub->registerCallback(boost::bind(&SegMapROSWraper::insertCloudCallback, this, _1));
m_globalcloudPub = m_nh.advertise<sensor_msgs::PointCloud2>("/global_map", 2, true);
}
~SegMapROSWraper()
{
delete m_pointCloudSub;
delete m_tfPointCloudSub;
}
void insertCloudCallback(const sensor_msgs::PointCloud2::ConstPtr &cloud)
{
pcl::PointCloud<pcl::PointXYZL> pc;
pcl::PointCloud<pcl::PointXYZL> pc_global;
pcl::fromROSMsg(*cloud, pc);
tf::StampedTransform sensorToWorldTf;
try
{
m_tfListener.lookupTransform("/world", cloud->header.frame_id, cloud->header.stamp, sensorToWorldTf);
}
catch (tf::TransformException &ex)
{
ROS_ERROR_STREAM("Transform error of sensor data: " << ex.what() << ", quitting callback");
return;
}
Eigen::Matrix4f sensorToWorld;
pcl_ros::transformAsMatrix(sensorToWorldTf, sensorToWorld);
pcl::transformPointCloud(pc, pc_global, sensorToWorld);
// std::cout<< sensorToWorld <<std::endl;
sensor_msgs::PointCloud2 map_cloud;
pcl::toROSMsg(pc_global, map_cloud);
map_cloud.header.stamp = ros::Time::now();
map_cloud.header.frame_id = "/map";
m_globalcloudPub.publish(map_cloud);
}
};
int main(int argc, char** argv) {
ros::init(argc, argv, "colored");
SegMapROSWraper SM;
ros::spin();
return 0;
} Ok, I get it now, thanks! ---- Replied Message ***@***.***>Date07/23/2021 18:15 ***@***.***> ***@***.******@***.***>SubjectRe: [mzahana/px4_fast_planner] use the planner in AirSim (#21)You just need to listen the /tf between two frames to generate a transform matrix, and make the transforming via pcl::transformPointCloud. Follows is a sample: `#include <ros/ros.h>
class SegMapROSWraper
{
private:
ros::NodeHandle m_nh;
ros::Publisher m_globalcloudPub;
message_filters::Subscriber
m_tfPointCloudSub = new tf::MessageFilter
m_tfPointCloudSub->registerCallback(boost::bind(&SegMapROSWraper::insertCloudCallback, this, _1));
m_globalcloudPub = m_nh.advertise
}
~SegMapROSWraper()
{
delete m_pointCloudSub;
delete m_tfPointCloudSub;
}
void insertCloudCallback(const sensor_msgs::PointCloud2::ConstPtr &cloud)
{
pcl::PointCloudpcl::PointXYZL pc;
pcl::PointCloudpcl::PointXYZL pc_global;
pcl::fromROSMsg(*cloud, pc);
tf::StampedTransform sensorToWorldTf;
try
{
m_tfListener.lookupTransform("/world", cloud->header.frame_id, cloud->header.stamp, sensorToWorldTf);
}
catch (tf::TransformException &ex)
{
ROS_ERROR_STREAM("Transform error of sensor data: " << ex.what() << ", quitting callback");
return;
}
Eigen::Matrix4f sensorToWorld;
pcl_ros::transformAsMatrix(sensorToWorldTf, sensorToWorld);
pcl::transformPointCloud(pc, pc_global, sensorToWorld);
// std::cout<< sensorToWorld <<std::endl;
sensor_msgs::PointCloud2 map_cloud;
pcl::toROSMsg(pc_global, map_cloud);
map_cloud.header.stamp = ros::Time::now();
map_cloud.header.frame_id = "/map";
m_globalcloudPub .publish(map_cloud);
} }; int main(int argc, char** argv) { ros::init(argc, argv, "colored"); SegMapROSWraper SM; ros::spin(); return 0; }
—You are receiving this because you were mentioned.Reply to this email directly, view it on GitHub, or unsubscribe. [ { @.": "http://schema.org", @.": "EmailMessage", "potentialAction": { @.": "ViewAction", "target": "https://github.com/mzahana/px4_fast_planner/issues/21#issuecomment-885539876", "url": "https://github.com/mzahana/px4_fast_planner/issues/21#issuecomment-885539876", "name": "View Issue" }, "description": "View this Issue on GitHub", "publisher": { @.": "Organization", "name": "GitHub", "url": "https://github.com" } } ]
 LJJcodeing
commented
7 months ago
LJJcodeing
commented
7 months ago @Yueting-Li Hello, could you please share how you modified the file connection to AirSim? I am also trying this thing, but I have no clue. Thank you in advance for your reply
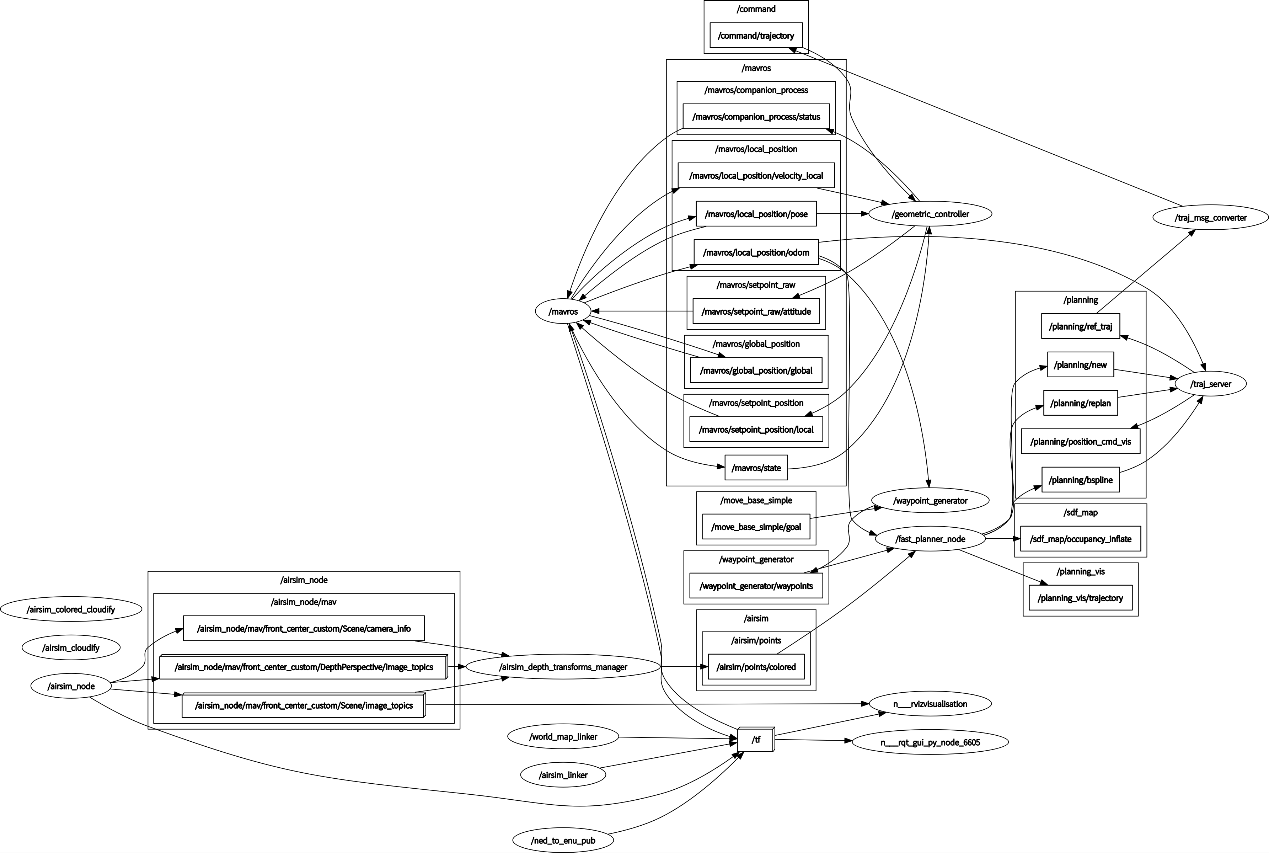
Hi, I want to use px4_fast_planner in AirSim simulator(PX4 SITL). I modify the launch file and run. But the uav failed to avoid obstacle。It just hit the obstacle and fell. This is my active node rosgraph. Could anyone help me?