 xxEoD2242
commented
2 years ago
xxEoD2242
commented
2 years ago Alright, this is a tricky, tricky problem I spent a massive amount of time trying to fix. I got mine to work but was using AirSim and it was an absolute nightmare. Hopefully this helps.
First, take a look in the launch file at the focal length values and ensure that they are consistent for the d435i. Check the launch file for Fast Planner, which sets the fx and fy values.
Second, look at the pose being output by the TF of the D435i camera. There may be a setting in the RealSense ROS node about orientation. This is the relevant code where it pulls in your camera orientation. SDF Map code. This orientation is used to determine where the individual pixel values captured in the image correspond to.
Third, determine what the overall reference in the message is for the pose of the camera. I think Fast Planner uses "World", which is common across ROS but I'm not sure about the RealSense node.
Good luck and let me know what you find. I have a d455 I use and would like to incorporate this as well.
 bhaskar-glitch
bhaskar-glitch



 Chai8226
Chai8226 sebnem-byte
sebnem-byte
Hi, Im using realsense d435i and facing an issue with the point cloud of realsense of topic /camera/depth/color/points in orientation of pointcloud is -y is upward...the problem is -y is facing toward z axis as in this picture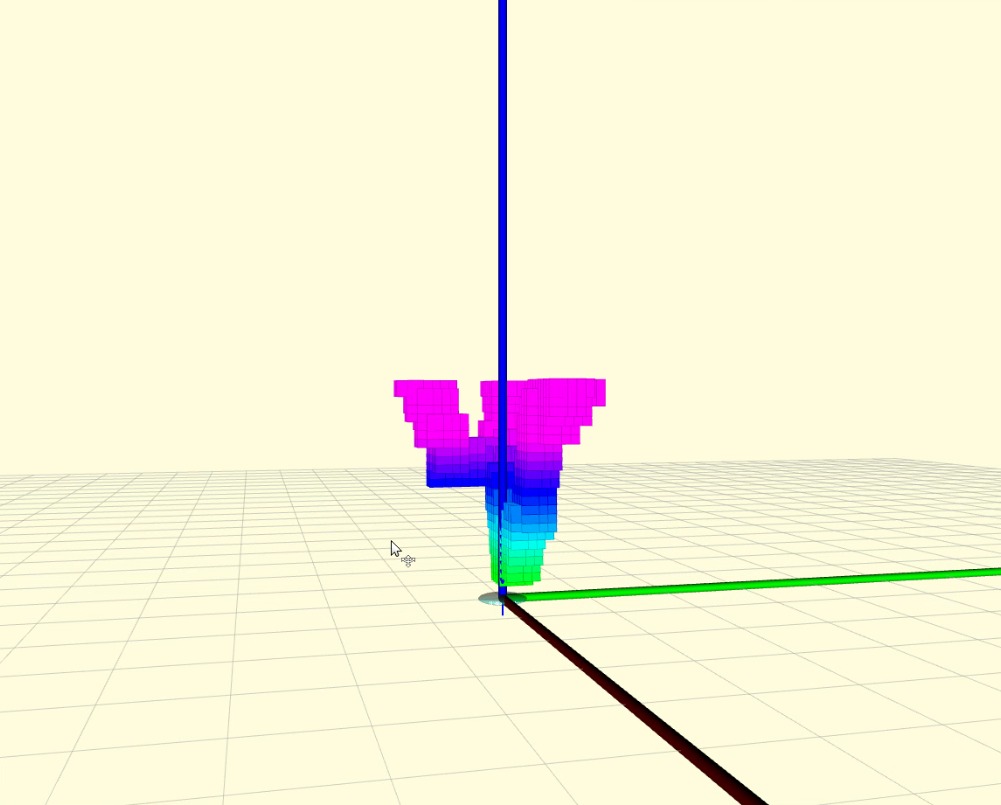
Please help