TMRh20
commented
3 years ago
TMRh20
commented
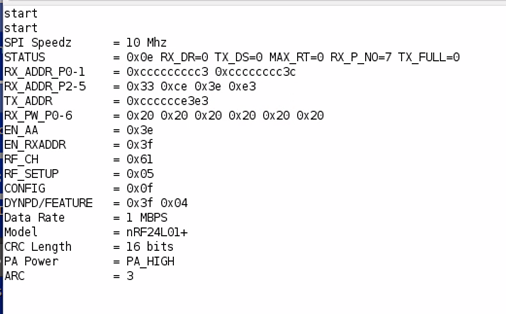
3 years ago The RX_ADDR_P0-1 address is fine, not sure what the problem would be. The SLIP examples never worked very well, really just a proof of concept, it’s recommended to use a raspberry Pi as the gateway with RF24gateway.
On Apr 4, 2021, at 12:30 PM, Bernard van der Nest @.***> wrote:
I am using the latest code downloaded from GitHub. I have very little nRF24 experience and using the libraries to learn. I successfully covered all the examples over the last few weeks up to the RF24Ethernet SLIP_InteractiveServer and SLIP_Gateway. I have made no code changes to the examples, except put a radio.printDetails() in the code to show the configuration. From the documentation it seems the problem is RX_ADDR_P0-1 in the SLIP_InteractiveServer code. I ask your assistance to help correct the addresses. RF24Ethernet SLIP_InteractiveServer:
RF24Ethernet SLIP_Gateway:
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub, or unsubscribe.
 RSABear
RSABear

I am using the latest code downloaded from GitHub. I have very little nRF24 experience and using the libraries to learn. I successfully covered all the examples over the last few weeks up to the RF24Ethernet SLIP_InteractiveServer and SLIP_Gateway. I have made no code changes to the examples, except put a radio.printDetails() in the code to show the configuration. From the documentation it seems the problem is RX_ADDR_P0-1 in the SLIP_InteractiveServer code. I ask your assistance to help correct the addresses. RF24Ethernet SLIP_InteractiveServer: RF24Ethernet SLIP_Gateway:
RF24Ethernet SLIP_Gateway: