 whyekit-motional
commented
1 month ago
whyekit-motional
commented
1 month ago @HYY-ying there are multiple radars on the ego, so you might have to consolidate all the points for all the radars at a given keyframe and then use that consolidated radar point cloud for the counting
 HYY-ying
HYY-ying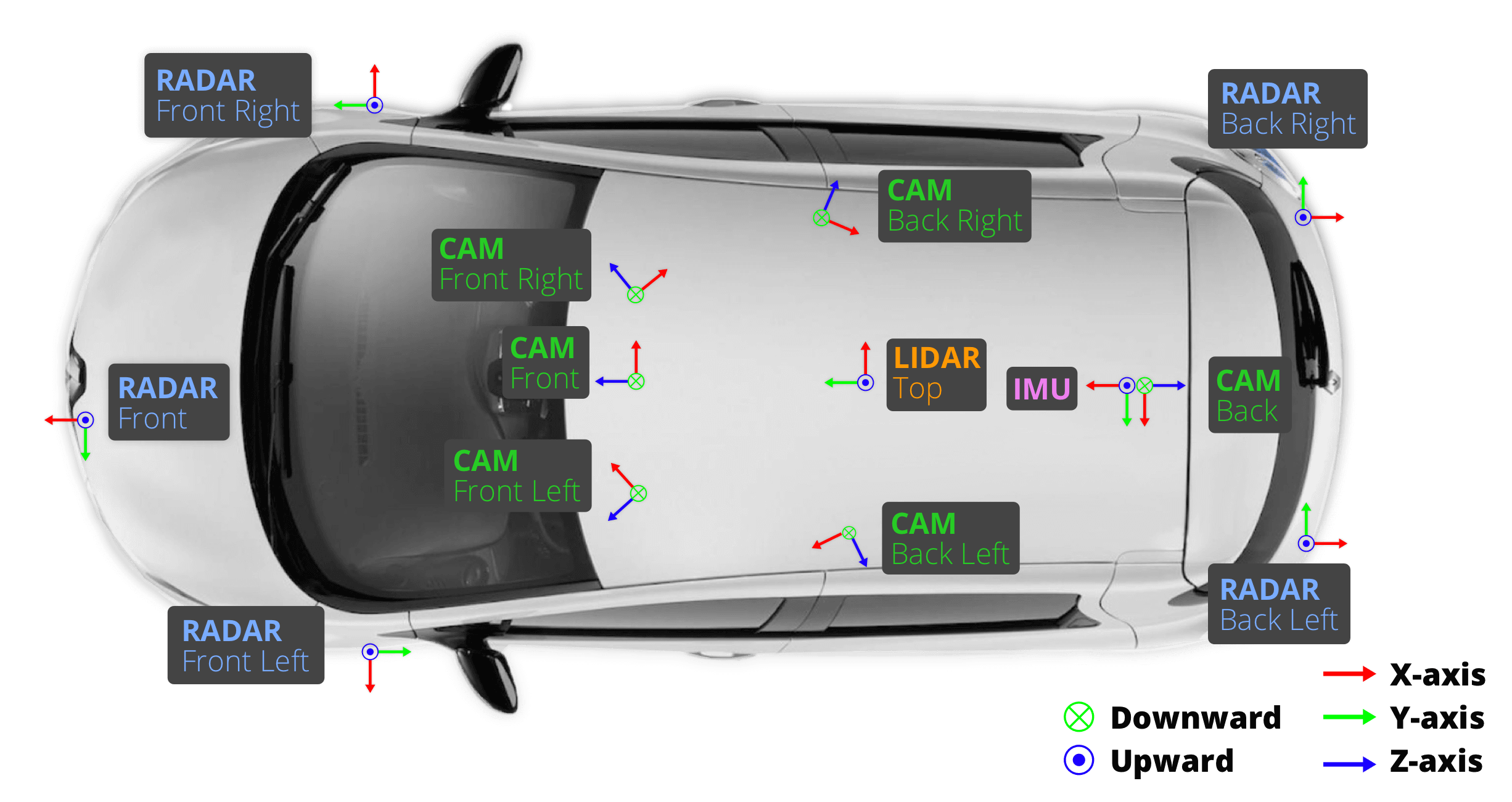{kind=link}
Hello! I would like to ask how the num_radar_pts parameter is obtained? Is it to convert the lidar bounding box and radar point cloud data into the same coordinate system and then use the function points_in_box from nuscenes.utils.geometry_utils to count? And how many radar sweeps were used? The result I got by converting the lidar bounding box and radar pcd data into the global coordinate and counting pts using function points_in_box from nuscenes.utils.geometry_utils is different from the num_radar_pts given in the sample_annotation. I only used just a single radar sweep and didn't do any invalid point filtering.