fgrimminger
commented
3 years ago
fgrimminger
commented
3 years ago Hello Pau,
thanks for your suggestions.
I am surprised to hear that you have so much trouble with the wire routing through the hip. Are you using the same encoder and motor phase connectors that we are using? (Details Wiring)
What kind of wires are you using? We had bad experiences with ribbon wires.
I first pull the encoder connector and wires through - then the three motor phase wires - one after the other. Using pliers helps sometimes.
Best. Felix

 nitrostormbcn
nitrostormbcn dvogureckiy99
dvogureckiy99
Hi, I'm Pau from PAL Robotics, we have found some improvement in the part "hip_fe_module_shell" that would greatly improve cable routing. We've had problems assembling the shoulder and this would ease manufacturing without changing the robot's geometry.
Before: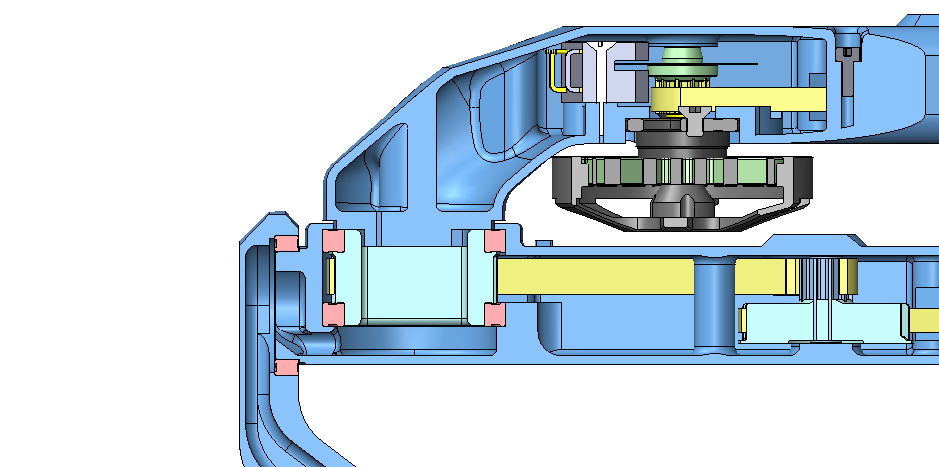
After: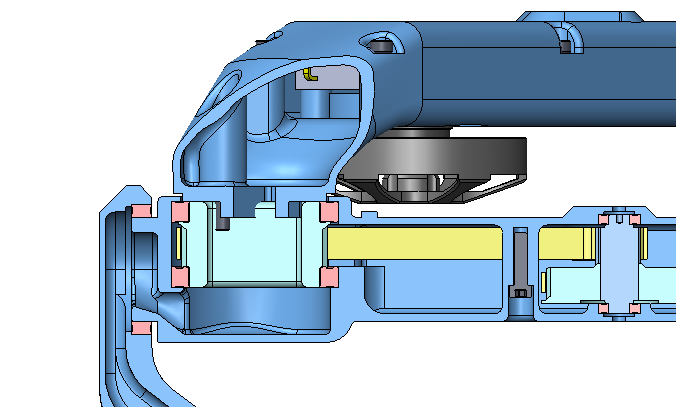
It only modifies the external shell and help routing. I can send you the modified part if you wish.