 Yadunund
commented
1 year ago
Yadunund
commented
1 year ago The obstacle detector is reporting the pose of the object wrt to frame lidar_link. The lane blocker has rmf_frame_id set to map. You'll need to provide a static transformation between the rmf_frame_id and map frames. You can use tf2_ros/static_transform_publisher for this.
 HappySamuel
HappySamuel


 Any idea what am i missing?
Any idea what am i missing? TheConstructAi
TheConstructAi eeoon
eeoon
Hi
I managed to have everything compiled, it shown hooked up on rqt node_graph. However when i place an obstacle in front of laserscanner, it complaints about no frame_id for header when being subscribed into
lane_blockernode.Complaint message from Lane Blocker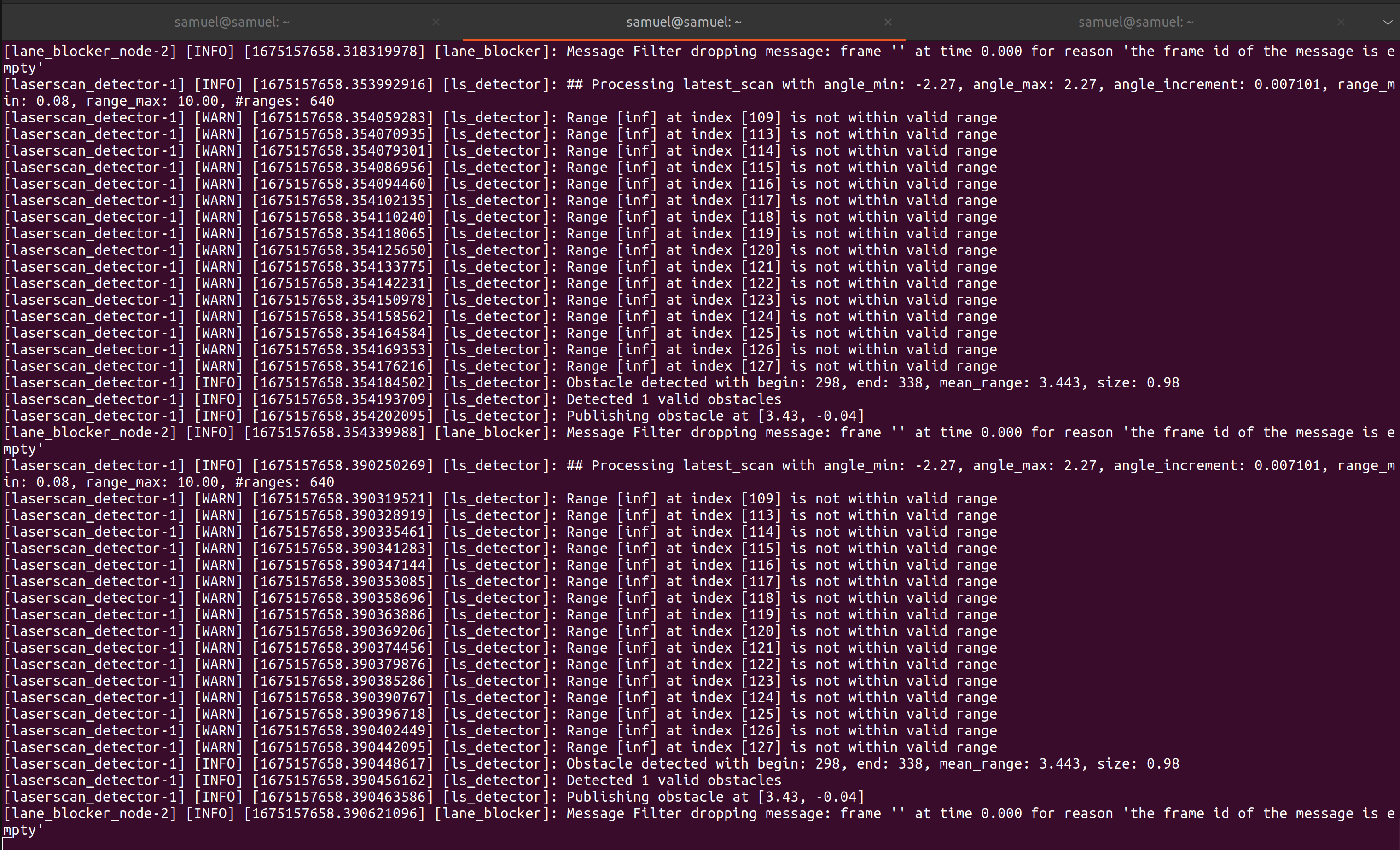
ROS2 topic echo of /rmf_obstacles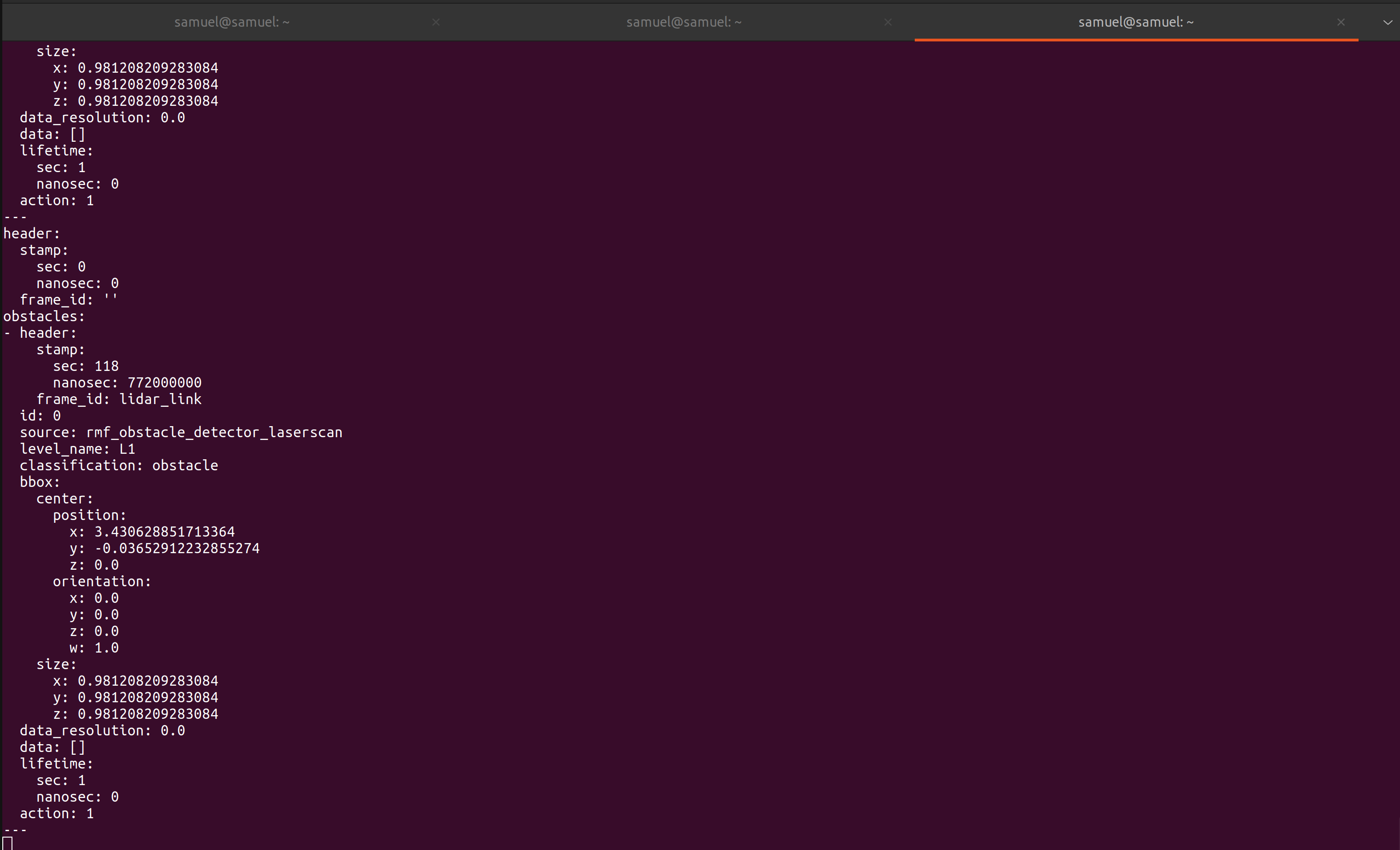
Launch File settings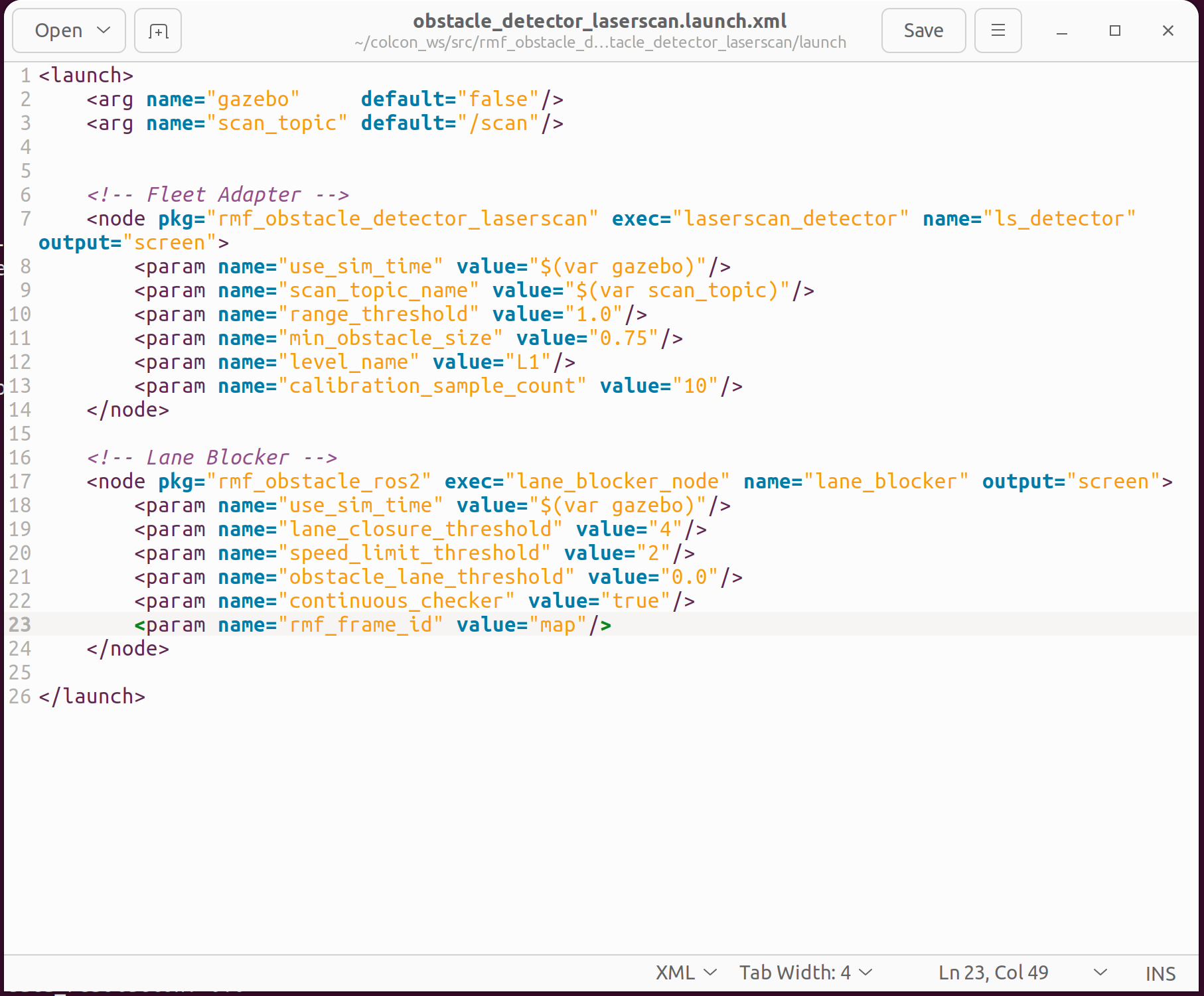
How shall i fill the frame_id for header msg of topic /rmf_obstacles ?
Best, Samuel