 douwefokkema
commented
2 years ago
douwefokkema
commented
2 years ago Very interesting. But please clarify the image for me. I understand the blue one is the original raw GPS. Is the pink one your KF? The green one is marked OpenCPN, but is this the track from OpenCPN or the results of the KF in radar_pi? The KF in radar_pi is only used to get the vessel position on a given time (could be in the future), not used otherwise by OpenCPN. Douwe, alternatively mail me at df@percussion.nl
 oscar-polheim
oscar-polheim
I've compared Kalman Filter used in radar_pi with the one I use in my projects with GPS.
From what I can see, radar_pi's KF seems not so good even compared to raw GPS.
Legend:
Sample is from a boat GPS at 10Hz: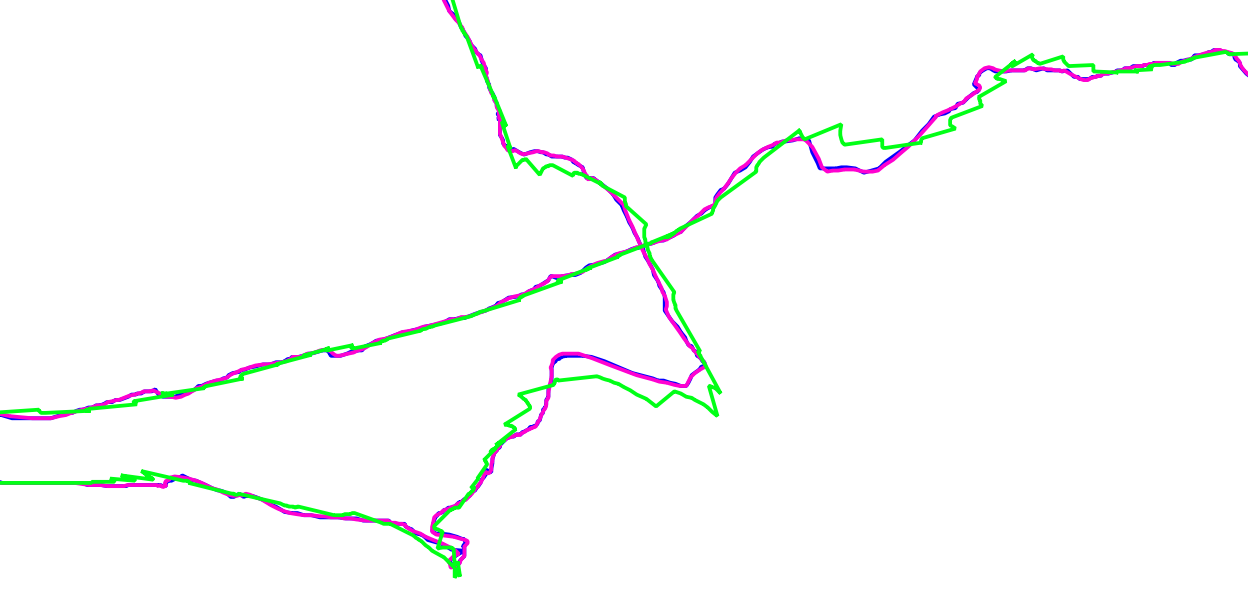
Is this something known or expected? Or should I dig deeper and try to understand if I did something wrong using radar_pi's KF.