MiaoRain
commented
3 years ago
MiaoRain
commented
3 years ago `#include <gflags/gflags.h>
include
include <samples/common.hpp>
include <samples/ocv_common.hpp>
include <samples/slog.hpp>
include <opencv2/opencv.hpp>
include
include
include
include
include
include
using namespace InferenceEngine;
const int num_class = 2; const int num_priors = 19248; const float score_threshold = 0.1f; const int topk = 100;
const float aspect_ratios[3] = { 5.f, 2.5f, 10.f }; const float scales[5] = { 24.f, 48.f, 96.f, 192.f, 384.f }; const int conv_w_list[5] = { 69, 35, 18, 9, 5 }; const int conv_h_list[5] = { 69, 35, 18, 9, 5 }; const float center_variance = 0.1f; const float size_variance = 0.2f;
define _IMGWIDTH (550)
define _IMGHEIGHT (550)
struct Object
{
int label;
float prob;
cv::Mat mask;
cv::Rect_
}; static const char* class_names[] = { "background", "bileiqi", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch", "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone", "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear", "hair drier", "toothbrush" };
static const unsigned char colors[19][3] = { {244, 67, 54}, {233, 30, 99}, {156, 39, 176}, {103, 58, 183}, { 63, 81, 181}, { 33, 150, 243}, { 3, 169, 244}, { 0, 188, 212}, { 0, 150, 136}, { 76, 175, 80}, {139, 195, 74}, {205, 220, 57}, {255, 235, 59}, {255, 193, 7}, {255, 152, 0}, {255, 87, 34}, {121, 85, 72}, {158, 158, 158}, { 96, 125, 139} }; int draw_objects(const cv::Mat& bgr, const std::vector
int color_index = 0;
//std::cout<<"!!!"<<objects.size()<<std::endl;
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
if (obj.prob < 0.2)
continue;
const unsigned char* color = colors[color_index++];
cv::rectangle(image, obj.rect, cv::Scalar(color[0], color[1], color[2]));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y),
cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
// draw mask
for (int y = 0; y < image.rows; y++)
{
const uchar* mp = obj.mask.ptr<uchar>(y);
cv::Vec3b* p = image.ptr<cv::Vec3b>(y);
for (int x = 0; x < image.cols; x++)
{
if (mp[x] == 255)
{
p[x] = cv::Vec3b(p[x][0] * 0.5 + color[0] * 0.5, p[x][1] * 0.5 + color[1] * 0.5, p[x][2] * 0.5 + color[2] * 0.5);
}
}
}
}
//cv::imwrite("result.png", image);
cv::imshow("image", image);
int key = cv::waitKey(0);
return key;}
cv::Mat makePriors(int num_priors, int height,int width) { cv::Mat priorbox(num_priors, 4, CV_32FC1); float pPriorbox = (float)priorbox.data; for (int n = 0; n < 5; n++) { int conv_w = conv_w_list[n]; int conv_h = conv_h_list[n]; float scale = scales[n];
for (int i = 0; i < conv_h; i++)
{
for (int j = 0; j < conv_w; j++)
{
float x = (j + 0.5f) / conv_w;
float y = (i + 0.5f) / conv_h;
for (int k = 0; k < 3; k++)
{
float ar = aspect_ratios[k];
ar = std::sqrt(ar);
float w = scale * ar / width;
float h = scale / ar / height;
h = w;
pPriorbox[0] = x;
pPriorbox[1] = y;
pPriorbox[2] = w;
pPriorbox[3] = h;
pPriorbox += 4;
}
}
}
}
return priorbox;}
static inline float intersectionarea(const Object& a, const Object& b)
{
cv::Rect
const int n = objects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = objects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = objects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = objects[picked[j]];
std::cout<<"!!! nms_sorted_bboxes "<<objects.size()<<" "<< ""<<std::endl;
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}} void decode(const float confidence, const float location,const float priorBox,const float mask,int width,int height,std::vector
int label = 0;
float score = 0.f;
for (int j = 1; j < num_class; j++)
{
float class_score = conf[j];
if (class_score > score)
{
label = j;
score = class_score;
}
}
if (label == 0 || score <= score_threshold)
continue;
float x_center = center_variance * box[0] * priors[2] + priors[0];
float y_center = center_variance * box[1] * priors[3] + priors[1];
float w = (float)(std::exp(size_variance * box[2]) * priors[2]);
float h = (float)(std::exp(size_variance * box[3]) * priors[3]);
float xmin = x_center - w * 0.5f;
float ymin = y_center - h * 0.5f;
float xmax = x_center + w * 0.5f;
float ymax = y_center + h * 0.5f;
xmin = std::max(std::min(xmin * width, (float)(width - 1)), 0.f);
ymin = std::max(std::min(ymin * height, (float)(height - 1)), 0.f);
xmax = std::max(std::min(xmax * width, (float)(width - 1)), 0.f);
ymax = std::max(std::min(ymax * height, (float)(height - 1)), 0.f);
Object obj;
obj.label = label;
obj.prob = score;
obj.rect.x = xmin;
obj.rect.y = ymin;
obj.rect.width = (xmax - xmin);
obj.rect.height = (ymax - ymin);
obj.maskdata = std::vector<float>(maskdata, maskdata + 32);
candidateBox[label].push_back(obj);
}
std::cout<<"!!! candidateBox "<<candidateBox.size()<<std::endl;
for (size_t i = 0; i < candidateBox.size(); i++)
{
std::vector<Object>& candidates = candidateBox[i];
std::sort(candidates.begin(), candidates.end(), [](const Object & a, const Object & b) { return a.prob > b.prob; });
std::vector<int> picked;
nms_sorted_bboxes(candidates, picked, 0.4f);
for (int j = 0; j < (int)picked.size(); j++)
{
int z = picked[j];
objects.push_back(candidates[z]);
}
}
std::sort(objects.begin(), objects.end(), [](const Object & a, const Object & b) { return a.prob > b.prob; });
std::cout<<"!!! objects "<<objects.size()<<std::endl;
if (topk < objects.size())
{
objects.resize(topk);
}}
int main() {
Core ie;
InferRequest::Ptr inferRequest;
CNNNetwork network = ie.ReadNetwork("/opt/intel/openvino_2021/deployment_tools/open_model_zoo/demos/model_debug/yolact_0414_1.xml");
ICNNNetwork::InputShapes inputShapes = network.getInputShapes();
std::string inName = inputShapes.begin()->first;
SizeVector & inSizeVector = inputShapes.begin()->second;
inSizeVector[0] = 1;
network.reshape(inputShapes);
InputInfo & inputInfo = *network.getInputsInfo().begin()->second;
inputInfo.getPreProcess().setResizeAlgorithm(ResizeAlgorithm::RESIZE_BILINEAR);
inputInfo.setLayout(Layout::NHWC);
inputInfo.setPrecision(Precision::U8);
OutputsDataMap outputsDataMap = network.getOutputsInfo();
for (auto& output : outputsDataMap) {
output.second->setPrecision(Precision::FP32);
}
ExecutableNetwork executableNetwork = ie.LoadNetwork(network, "CPU");
inferRequest = executableNetwork.CreateInferRequestPtr();
cv::Mat priorBox = makePriors(num_priors, inSizeVector[2], inSizeVector[3]);
cv::Mat img;
//cv::VideoCapture cap(0);
img = cv::imread("/opt/intel/openvino_2021/deployment_tools/open_model_zoo/demos/model_debug/bileiqi.jpeg");
while (1)
{
//cap >> img;
if (img.empty())
continue;
cv::resize(img,img,cv::Size(_IMG_WIDTH_,_IMG_HEIGHT_));
inferRequest->SetBlob(inName, wrapMat2Blob(img));
inferRequest->Infer();
//0412.xml
//Blob::Ptr locationBlob = inferRequest->GetBlob("722"); //4*19248
//Blob::Ptr maskmapsBlob = inferRequest->GetBlob("526");//138*138*32
//Blob::Ptr maskBlob = inferRequest->GetBlob("724"); //32*19248
//Blob::Ptr confidenceBlob = inferRequest->GetBlob("726"); //2*19248
//0414.xml
Blob::Ptr locationBlob = inferRequest->GetBlob("721"); //4*19248
Blob::Ptr maskmapsBlob = inferRequest->GetBlob("525");//138*138*32
Blob::Ptr maskBlob = inferRequest->GetBlob("723"); //32*19248
Blob::Ptr confidenceBlob = inferRequest->GetBlob("725"); //2*19248
std::vector<Object> objects;
decode(as<MemoryBlob>(confidenceBlob)->rmap().as<float*>(),as<MemoryBlob>(locationBlob)->rmap().as<float*>(),
(float*)priorBox.data,as<MemoryBlob>(maskBlob)->rmap().as<float*>(),img.cols, img.rows, objects);
const float* pMaskmaps = as<MemoryBlob>(maskmapsBlob)->rmap().as<float*>();
for (size_t i = 0; i < objects.size(); i++)
{
Object& obj = objects[i];
cv::Mat mask(138, 138, CV_32FC1);
{
mask = cv::Scalar(0.f);
for (int p = 0; p < 32; p++)
{
const float* maskmap = pMaskmaps + p * 138 * 138;
float coeff = obj.maskdata[p];
float* mp = (float*)mask.data;
for (int j = 0; j < 138 * 138; j++)
{
mp[j] += maskmap[j] * coeff;
}
}
}
cv::Mat mask2;
cv::resize(mask, mask2, cv::Size(img.cols, img.rows));
obj.mask = cv::Mat(img.rows, img.cols, CV_8UC1);
{
obj.mask = cv::Scalar(0);
for (int y = 0; y < img.rows; y++)
{
if (y < obj.rect.y || y > obj.rect.y + obj.rect.height)
continue;
const float* mp2 = mask2.ptr<const float>(y);
uchar * bmp = obj.mask.ptr<uchar>(y);
for (int x = 0; x < img.cols; x++)
{
if (x < obj.rect.x || x > obj.rect.x + obj.rect.width)
continue;
bmp[x] = mp2[x] > 0.5f ? 255 : 0;
}
}
}
}
int key = draw_objects(img, objects);
if (key == 27)break;
}
return 0;}`
 vladimir-dudnik
vladimir-dudnik
 eaidova
eaidova
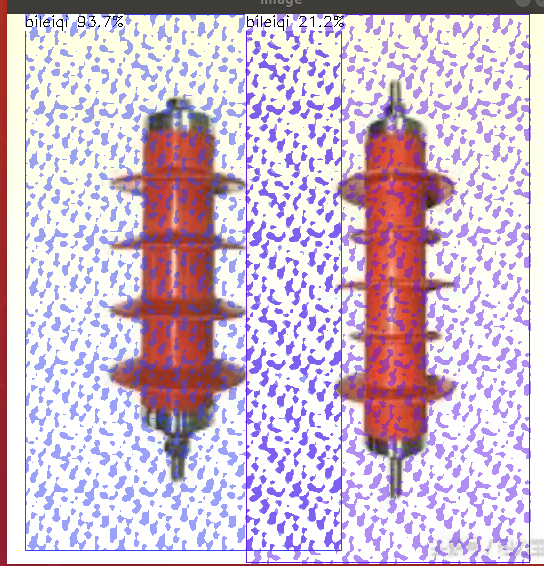
HI I used the yolact model to predict,the mask distributes scatterly and dispersely. How to deal with this?