 osrf-migration
commented
9 years ago
osrf-migration
commented
9 years ago Closed osrf-migration closed 9 years ago
osrf-migration
commented
9 years ago osrf-migration
commented
9 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
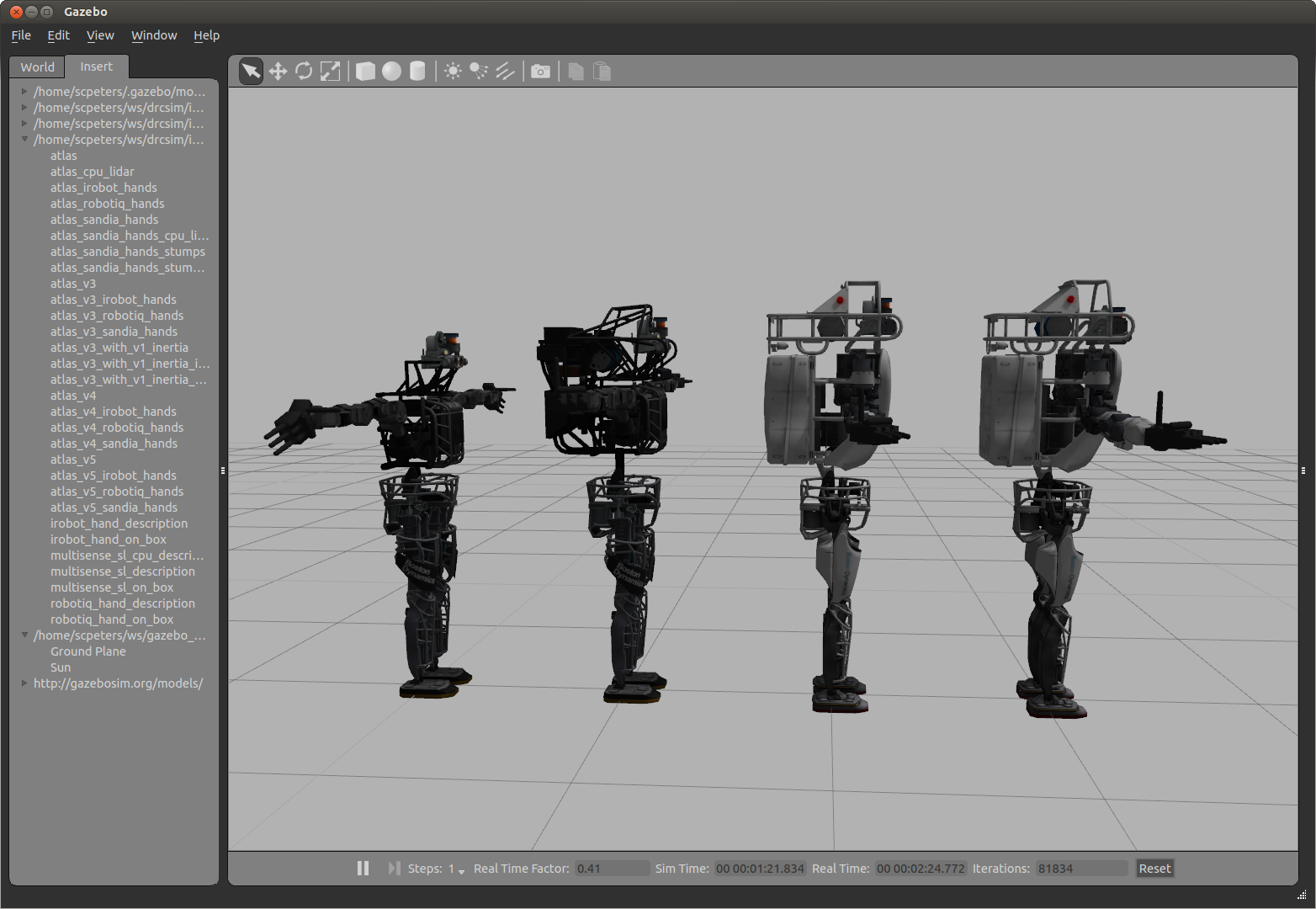
I ran into this today when I wanted to spawn multiple versions of atlas side-by-side to compare their kinematic differences. It's worth noting that the head_hokuyo_sensor is a gpu_ray sensor.
@iche033 is this a known issue with the gpu_ray sensor?
osrf-migration
commented
9 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
I'm going to create a gazebo issue for this.
osrf-migration
commented
9 years ago osrf-migration
commented
9 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
I just tested a fix. We will make a gazebo pull request soon.
osrf-migration
commented
9 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
https://bitbucket.org/osrf/gazebo/pull-request/1360/handle-gpulaser-name-collisions-1403/diff
osrf-migration
commented
9 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
It is fixed in gazebo if you build from source, but it hasn't been released yet.
osrf-migration
commented
9 years ago Original comment by Jackie K (Bitbucket: jacquelinekay).
Is the protocol to close this issue after Gazebo 4.1 gets patched?
osrf-migration
commented
9 years ago Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
issue resolved in gazebo 4.1.1, which has been released
Original report (archived issue) by Jackie K (Bitbucket: jacquelinekay).
Not a common use case for DRCSim, but spawning multiple Atlases using the "Insert Model" tab causes Gazebo to crash: