 osrf-migration
commented
9 years ago
osrf-migration
commented
9 years ago Open osrf-migration opened 9 years ago
osrf-migration
commented
9 years ago osrf-migration
commented
9 years ago Original comment by Stefan Kohlbrecher (Bitbucket: Stefan_Kohlbrecher).
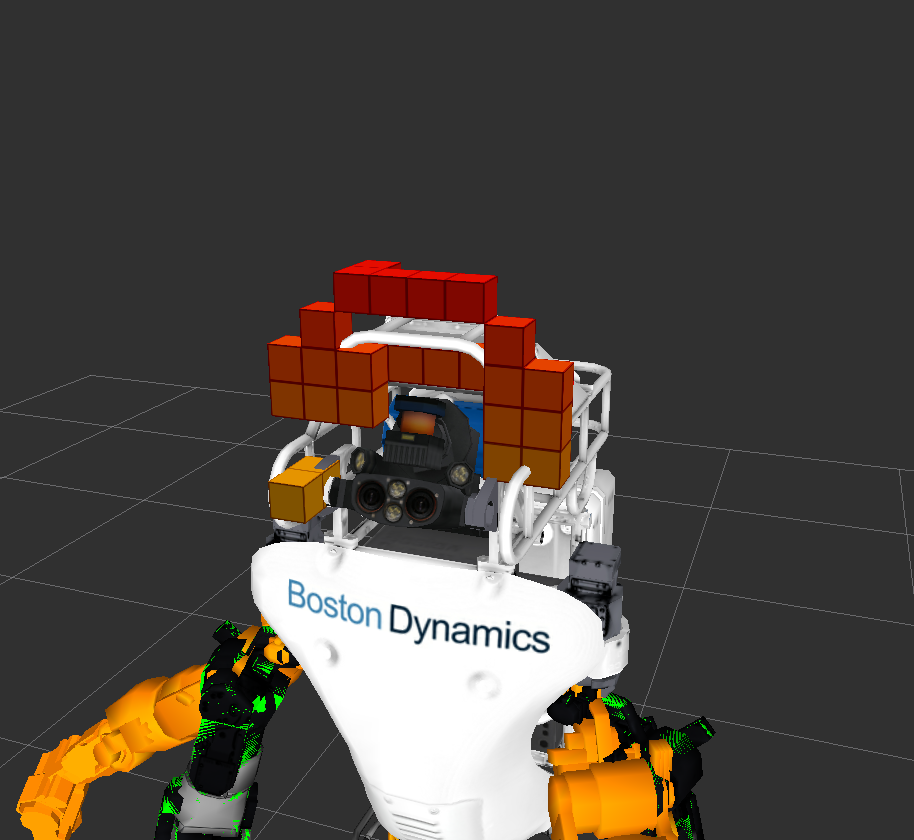
Any news on this? For reference, this is a example self filter failure one sees when using drcsim if no special treatment (like specifying a high min range) for the sensor data is performed.
osrf-migration
commented
9 years ago Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
There should be an update early next week.
osrf-migration
commented
9 years ago osrf-migration
commented
9 years ago Original comment by Stefan Kohlbrecher (Bitbucket: Stefan_Kohlbrecher).
The upper torso in it's current form also causes collisions between the arms and torso in some joint configurations that do not cause collisions on the real robot. Given the curved shape, it is not trivial get this accurate with simple shapes, however.
osrf-migration
commented
9 years ago osrf-migration
commented
9 years ago
Original report (archived issue) by Stefan Kohlbrecher (Bitbucket: Stefan_Kohlbrecher).
The quality of the simple collision models for atlas v4 and v5 varies depending on the part of the robot one looks at. The arms seem to be fairly accurate, while the upper parts of the legs and the area around the head are missing parts of collision geometry. They basically look like someone worked on them and then discontinued before being finished. The current state causes issues with collision free motion planning and self-filtering due to pieces of geometry missing.
See for example attached images of head missing some of the metal rod structure. This causes a lot of issues with self filtering.
Will the simple collision geoms be improved by OSRF in the (near) future?