 osrf-migration
commented
7 years ago
osrf-migration
commented
7 years ago Original comment by Tom Tseemceeb Xiong (Bitbucket: Tom_Xiong).
I've experienced this exact same issue several times now. Though it's only really bad when I use the 2ms boost. Otherwise without it I don't see those problems
Original report (archived issue) by GoRobotGo (Bitbucket: GoRobotGo).
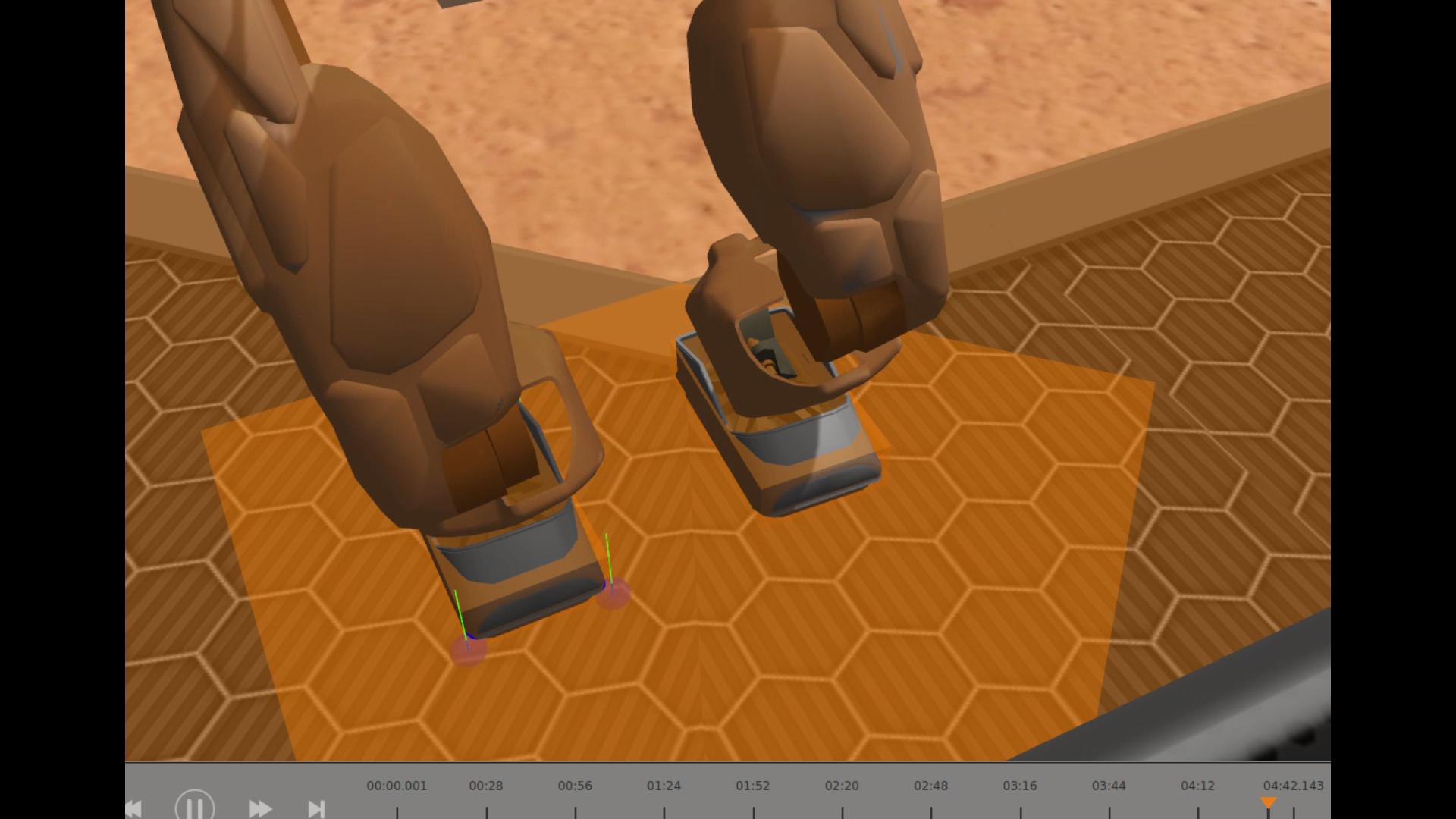
The original report had attachments: footGlitch.mp4, withcontacts.mp4, twostep.cpp, contact_flicker.mp4, contact_flicker.log
There appears to be an odd contact behavior that causes the foot to glitch or fall near the table on sample task 2. I am not sure if it is present elsewhere in other worlds, but it is present in this world. It does appear to be repeatable. I have attached a video with collisions and one with contacts to illustrate the issue. To repeat: