 osrf-migration
commented
7 years ago
osrf-migration
commented
7 years ago Original comment by Steven Gray (Bitbucket: stgray).
To quote @knitfoo from #207 -- this seems to be the same issue I'm seeing. Reharnessing succeeds and detaches, but Valkyrie cannot walk again.
Essentially, if you fall down, the robot is unusable from that point forward;
you have to restart the sim to regain use of the legs. You can reharness
two, three, a zillion times, and the first step you attempt to take results in
disaster. It's not clear exactly why; I have some sense that the robot may
have lost it's sense of foot position (i.e. we command a baby step, and
Val tries to take a huge step).
Original report (archived issue) by Steven Gray (Bitbucket: stgray).
After falling, when Valkyrie is reharnessed, the /world to /pelvis transform changes -- namely, upon release, her pelvis pose is between half a meter and a few meters lower. Attempting to command any footstep results in Valkyrie falling.
It looks like a whole body trajectory is given to the IHMC controller using Valkyrie's state prior to the fall (chest orientation, pelvis height, arm joint angles -- everything but the pelvis orientation and pelvis x,y position). Noticed this last part after Valkyrie fell and I skipped to a new checkpoint.
Here's a video trying to move the left foot forward only 5cm. I use the current foot in world position from TF and displace it 5cm. Valkyrie lifts her foot and essentially sits down.
The image shown is Valkyrie's position before falling in the task 1 start box (red) and her position after reharnessing at task 1 checkpoint 2. This is one of the more extreme vertical shifts I've seen. It also shows her torso tracking it's orientation from before the fall.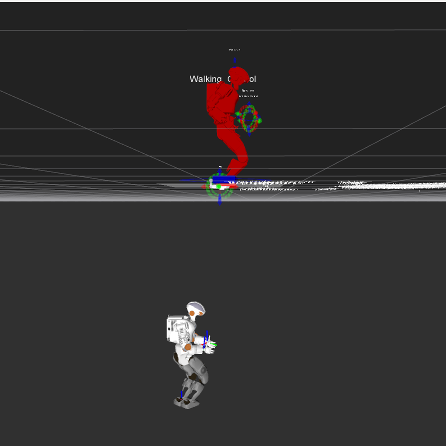
(Splitting this out from #207 as it is separate from Valkyrie being in a weird configuration as it reharnesses and also happens after a successful reharness and detach)